Как устроен танковый привод
ГЛАВНАЯ | ПЕРСПЕКТИВЫ | БОЕВОЕ ПРИМЕНЕНИЕ | НОВЕЙШИЕ РАЗРАБОТКИ | НА ВООРУЖЕНИИ | ГАЛЕРЕЯ | ССЫЛКИ | ГОСТЕВАЯ
Системы стабилизации в современных танках
Stabilization Systems in Modern Tanks
Military Technology , 2001,
Special Issue No 3, p . 78-79
BTVT . narod . ru
Основной задачей системы стабилизации является приведение орудия в нужное время в нужное положение при наведении и стрельбе по цели. Когда экипаж танка опознал цель, наводчик должен навести прицельную марку на цель для достижения самого высокого уровня поражения. Система стабилизации должна позволять наводчику сопровождать движущуюся цель без больших отклонений линии прицеливания. Основным требованием к системе стабилизации является точная стрельба по неподвижным и движущимся целям во время высокоскоростного движения танка. Лишь хорошая система стабилизации приводит к высокой вероятности попадания первым выстрелом.
Рис. 1. Вертикальный привод
«Система согласования орудия с прицелом» обеспечивает требуемые высокие характеристики. Наводчик управляет стабилизированной линией прицеливания, а система стабилизации пушки и башни согласуется с линией прицеливания с учетом поправки в угол прицеливания и поправки в угол упреждения.
Рис. 2. Головка зеркала
Точная стрельба возможна лишь в том случае, если ствол пушки находится в точно заданном положении в момент стрельбы, предполагая, что линия прицеливания установлена наводчиком в нужное положение. Это контролируется схемой совпадений. Схема проверяет отклонение положения пушки относительно линии прицеливания посредством сравнения сигналов решающим устройством от головного зеркала и приводов пушки и башни.
Если сигналы находятся в пределах какого-то небольшого окна, выполняется одно условие стрельбы. Другим условием является скорость перемещения ствола пушки по вертикали и горизонтали в пределах окна совпадений. Скорость должна быть нулевой с малой допустимой погрешностью, что означает, что ствол пушки не выйдет за пределы окна совпадений во время стрельбы.
Электрическая система стабилизации пушки и башни танка «Леопард-2» состоит из вертикального привода с бесщеточным электродвигателем постоянного тока, тормоза и планетарного ряда. Этот ряд обеспечивает большой момент для удержания орудия даже при движении в нестабилизированном режиме на труднопроходимой местности. Привод башни имеет бесщеточный электродвигатель постоянного тока, а также редуктор и тормоз.
Электродвигатели приводятся в действие с помощью электронного блока управления энергией, который соединен с 24-В источником питания. Функции управления и переключения всех режимов реализованы в электрическом блоке стабилизации.
Датчиками стабилизации являются гироскопы с двумя степенями свободы, два– на пушке и один для определения направления перемещения башни – в башне.
Электронный блок управления состоит из трех контуров управления, один для включения электродвигателя, другой – для определения угловой скорости и третий – для согласования положений.
Если этот блок управления вышел из строя, это значит, что один из элементов: электродвигатель, электронный блок управления энергией, сервоуправление или гироскоп – не работает, а для перемещения пушки и башни необходимо использовать аварийный контур.
Приводы пушки и башни имеют отдельные аварийные электродвигатели. Эти электродвигатели приводятся в действие специальным аварийным блоком управления от 24-В источника питания. Перемещениями пушки и башни управляют с помощью ручки управления (джойстика) на рабочем месте наводчика.
Большая неуравновешенность пушки L -55 танка «Леопард-2А6» потребовала интеграции новых контуров управления в контуры систем приводов пушки и башни. Электрическая система стабилизации пушки и башни достигла таких же высоких характеристик, но с дополнительными датчиками и электронным оборудованием, при значительно более высоком несбалансированном крутящем моменте и моменте инерции.
Достоинствами электрической системы являются:
— высокая надежность и, следовательно, высокий коэффициент готовности;
— нет необходимости в дополнительной оптимизации параметров контуров управления даже в условиях экстремальных температур.
Рис. 3. Электрические приводы для бронированной машины ( боевого и специальных танков, зенитных платформ, устанавливаемых на танках гаубиц)
Хорошая защита экипажа обеспечивается благодаря тактическим преимуществам:
— низкая ИК сигнатура (никакого рассеяния тепла);
— низкий уровень шумов (нет гидравлического насоса и компрессора);
— отсутствие риска пожара (нет воспламеняющейся гидравлической жидкости).
Низкий расход энергии позволяет вести бесшумное наблюдение при питании от аккумуляторной батареи и экономить энергию для другого электрического оборудования. Низкая стоимость жизненного цикла достигается за счет практически отсутствия необходимости обслуживания. Система может быть включена и эксплуатироваться с известными характеристиками даже после длительного перерыва в работе.
Все подсистемы танка «Леопард-2» были разработаны и произведены одной отдельной фирмой ESW . Она не только поставляет элементы, а также отвечает за систему в целом.
Хорошая защита экипажа обеспечивается благодаря тактическим преимуществам:
— низкая ИК сигнатура (никакого рассеяния тепла);
— низкий уровень шумов (нет гидравлического насоса и компрессора);
— отсутствие риска пожара (нет воспламеняющейся гидравлической жидкости).
Низкий расход энергии позволяет вести бесшумное наблюдение при питании от аккумуляторной батареи и экономить энергию для другого электрического оборудования. Низкая стоимость жизненного цикла достигается за счет практически отсутствия необходимости обслуживания. Система может быть включена и эксплуатироваться с известными характеристиками даже после длительного перерыва в работе.
Все подсистемы танка «Леопард-2» были разработаны и произведены одной отдельной фирмой ESW . Она не только поставляет элементы, а также отвечает за систему в целом, что гарантирует уровень танка «Леопард-2».
Новейшие приводы орудийных башен также разрабатываются фирмой ESW для использования в легких танках.
Фирма ESW является надлежащей фирмой для обращения по поводу систем стабилизации для легких, средних и тяжелых танков при реализации международных программ.
ЗРК «Стрела-10»
11. Система прицеливания и привод пусковой установки ЗРК «Стрела-10»
1. Средства прицеливания
Средства прицеливания БМ — визир грубой наводки и оптический визир 9Ш127. Оба визира размещены в башне.
Визир грубой наводки предназначен для грубого наведения ПУ на цель, что обеспечивает попадание цели в поле оптического визира. Он представляет собой рычаг, связанный с люлькой и имеющий угломестную шкалу. На конце рычага установлено прицельное кольцо.
Оптический визир предназначен для:
— точного наведения ПУ на цель, чем обеспечивается попадание цели в поле зрения ГСН ракеты;
— определения надежности захвата цели ГСН;
— определения момента пуска ракеты;
— ввода углов упреждения ПУ перед пуском (в ручном режиме);
— наблюдения в поле зрения визира сигналов пассивного радиопеленгатора.
Оптический визир состоит из головной и средней частей и окуляра (рис.1) и размещен перед оператором. Часть визира, расположенная снаружи башни, закрыта кожухом с откидной крышкой. Крышка открывается оператором с помощью рычага.
Рис. 1. Оптический визир
Поле зрения визира по азимуту составляет 35°, по углу места — 28°; увеличение — 1,8 раза, напряжение питания — 24 В.
В поле зрения оптического визира оператор наблюдает (рис. 2):
— три кольца упреждений;
— световые сигналы ЗОНА, НИЗ, ОБЪЕКТ СПРАВА, ОБЪЕКТ СЛЕВА.
Рис. 2. Поле зрения оптического визира
Кольцо — перекрестие указывает, куда направлена ось контейнера с ракетой, т. е. куда произведено прицеливание.
Следящая марка показывает, куда направлена ось ГСН. Эта марка при включении режима БОРТ совмещается с кольцом-перекрестием, при включении режима СЛЕЖЕНИЕ перемещается, охватывая цель, а при выключении питания аппаратуры запуска может занимать любое положение в поле зрения визира.
Кольца упреждений предназначены для ввода угловых упреждений в ручном режиме работы приводов наведения.
Световой сигнал ЗОНА загорается при включенной АОЗ, если цель вошла в зону пуска ракеты.
Световой сигнал НИЗ загорается при угле места люльки 20° и менее. В этом случае при пуске ракеты необходим ввод вертикального упреждения.
Световые сигналы ОБЪЕКТ СЛЕВА, ОБЪЕКТ СПРАВА являются сигналами пассивного радиопеленгатора и указывают, в какой стороне находится цель.
2. Аппаратура навигации
В БМ «Стрела-10» используется танковая навигационная аппаратура ТНА-3. Эта аппаратура является счетно-решающим комплексом и предназначена для непрерывной выработки текущих координат, дирекционного угла БМ и угла направления на пункт назначения (рис. 3).
Рис. 3 . Дирекционные углы БМ и ПУ
— установку и считывание прямоугольных координат и дирекционного угла БМ;
— установку и считывание разностей координат пункта назначения и БМ в пределах 100 км;
— считывание дирекционного угла на пункт назначения;
— введение корректуры пути на юз, пробуксовку и неровности местности.
В состав ТНА входят :
— преобразователь ПТ — 200Ц.
Для приема целеуказания и ориентирования ПУ при боевой работе совместно с ТНА-3 работает указатель азимута .
Датчик пути установлен в отсеке главной передачи МТ-ЛБ. Он вырабатывает электрические сигналы, пропорциональные пройденному пути и скорости БМ.
Координатор (рис. 4) установлен справа от командира и предназначен для ввода исходных данных, а также для выработки и индикации текущих координат движущейся БМ, ее дирекционного угла и дирекционного угла на пункт назначения. Кроме этого координатор обеспечивает проверку работоспособности аппаратуры.
Рис. 4 . Координатор ТНА-3
Курсоуказатель установлен справа перед механиком — водителем и предназначен для индикации дирекционного угла машины (рис.5).
Рис. 5 . Курсоуказатель
Гирокурсоуказатель расположен слева от оператора на дне БМ. Он предназначен для измерения дирекционного угла машины и представляет собой трехстепенной гироскоп. Он сохраняет в пространстве заданное перед пуском направление вращения своей оси, т. е. продольной оси БМ, которое она имела до начала движения. При движении БМ углы отклонения ее продольной оси от исходного положения измеряются, и определяется текущий дирекционный угол.
Пульт управления расположен рядом с координатором и предназначен для настройки гирокурсоуказателя.
Преобразователь ПТ-200Ц установлен в кормовой части БМ и предназначен для выработки переменного тока частотой 400 Гц и напряжением 36 В.
Перед началом движения в аппаратуру вводятся исходные значения координат и дирекционного угла БМ, корректура пути на юз, пробуксовку и рельеф местности. При необходимости вводится и разность координат пункта назначения и местоположения БМ.
Информация о пройденном пути поступает от ходовой части через гибкий валик на датчик пути, где она преобразуется в электрический сигнал. Этот сигнал поступает в координатор. Кроме этого, в координатор из гирокурсоуказателя поступает информация о текущем дирекционном угле БМ.
Координатор на основании входных данных постоянно определяет координаты и дирекционный угол движущейся БМ, которые отображаются на табло и указателях.
Если была введена разность координат пункта назначения и местоположения БМ, то координатор определяет и дирекционный угол на пункт назначения.
Помимо ТНА-3 в БМ имеется и указатель азимута (рис. 6). Он предназначен для ориентирования ПУ и установлен перед оператором слева от оптического визира. На указателе имеется шкала азимута в градусах и делениях угломера и две стрелки.
Рис. 6 . Указатель азимута
Белая стрелка показывает угол поворота ПУ относительно оси БМ, а черная стрелка – дирекционный угол продольной оси башни. При движении БМ указатель азимута работает от ТНА-3, постоянно показывая оператору дирекционный угол и угол поворота ПУ.
3. Устройство и работа привода наведения
Электрический привод пусковой установки предназначен для перевода ПУ из походного положения в боевое и обратно и вращения ее в вертикальной и горизонтальной плоскостях.
Привод состоит из:
— электропривода вертикального наведения (ВН);
— электропривода горизонтального наведения (ГН);
— электропривода механизма перевода из походного положения в боевое и обратно.
— перевод ПУ из походного положения в боевое и обратно;
— наведение ПУ в вертикальной плоскости в пределах от -5° до +80° и в горизонтальной плоскости без ограничений;
— автоматическое «слежение» за целью в режиме СЛЕЖЕНИЕ при сопровождении цели ГСН;
— автоматическую отработку угловых упреждений по команде ПУСК и торможение ПУ в момент старта ракеты.
Для управления приводами наведения ПУ на цель служит пульт наведения (ПН).
ПН установлен перед оператором на откидном кронштейне, который фиксируется защелкой в рабочем положении. На нем размещены две рукоятки управления ПУ по азимуту и углу места и гашетка включения приводов ВН и ГН.
Электропривод ВН представляет собой следящую систему, которая управляет положением ПУ в вертикальной плоскости (рис.7).
Рис. 7 . Функциональная схема привода вертикального наведения
В состав электропривода входят:
— задающий потенциометр, расположенный в пульте наведения;
— блок управления приводом;
— блок усилителей ВН;
— исполнительный двигатель с тахогенератором (ТГ) и потенциометром обратной связи (ПОС).
Совместно с приводом ВН работает редуктор ВН, в котором размещены тормоз и блок микровыключателей.
Задающий потенциометр предназначен для формирования управляющего сигнала следящей системы.
Блок управления приводами (БУП) предназначен для предварительного усиления управляющих сигналов по мощности. БУП является общим блоком для всех электроприводов ПУ. На БУП расположены автоматы защиты сети (АЗС): ВВ — вращение вертикальное; ВГ — вращение горизонтальное; ВП — вращение перевода, которые обеспечивают защиту приводов ВН, ГН и механизма перевода от перегрузок по току. БУП размещен на подвеске справа от сиденья оператора.
Блок усилителей ВН предназначен для окончательного усиления сигналов по мощности. Он размещен на подвеске рядом с БУП.
Исполнительный двигатель с редуктором предназначен для перемещения люльки по углу места. В редукторе размещены элементы следящей системы: тахогенератор и потенциометр обратной связи (ПОС), а также конструктивно размещен блок микровыключателей.
Электропривод ГН представляет собой следящую систему дистанционного управления вращением ПУ в горизонтальной плоскости (рис. 8). Скорость вращения ПУ задается углом поворота ручек пульта наведения влево (вправо).
Рис. 8 . Функциональная схема привода горизонтального наведения
Все узлы и элементы привода ГН аналогичны узлам и элементам привода ВН. В состав привода ГН не входит ПОС.
Совместно с приводом ГН работает редуктор ГН. Редуктор ГН имеет ручной дублер для вращения ПУ по азимуту вручную.
Для включения приводов необходимо перевести ПУ в боевое положение, включить тумблеры 24 В, 28 В и ПРИВОД на ПО (рис.9) и нажать гашетку на правой ручке ПН.
Рис. 9 . Пульт оператора
Приводы наведения ПУ могут работать в полуавтоматическом или автоматическом режиме.
Основным режимом является полуавтоматический.
Работа привода ВН в полуавтоматическом режиме.
При повороте ручек ПН вверх (вниз) от нулевого положения с задающего потенциометра снимается сигнал управления, пропорциональный углу поворота ручек, который поступает в блок управления приводами для предварительного усиления его по мощности.
С БУП сигнал управления поступает в блок усилителей ВН, где окончательно усиливается по мощности до величины, обеспечивающей нормальную работу исполнительного двигателя. Усиленный сигнал поступает на обмотку исполнительного двигателя, который через редуктор поворачивает люльку в вертикальной плоскости. Одновременно редуктор поворачивает также ось потенциометра обратной связи (ПОС) на заданный угол. С ПОС снимается напряжение обратной связи, пропорциональное положению люльки, и подается на вход усилителя ВН с обратным знаком управляющему сигналу. При достижении люлькой заданного угла разностное напряжение на выходе усилителя ВН будет равным нулю и исполнительный двигатель остановится. Кроме того, на вход усилителя поступает сглаживающее напряжение с тахогенератора, что обеспечивает плавность отработки люлькой заданного угла.
При отпускании гашетки ПУ затормаживается, а при отпускании ручек под действием пружины они возвращаются в исходное положение.
Работа привода ГН в полуавтоматическом режиме.
При повороте корпуса ПН вправо (влево) от нулевого положения с задающего потенциометра снимается управляющий сигнал. Цепь прохождения сигнала аналогична цепи прохождения в приводе ВН, за исключением отсутствия отрицательной обратной связи. Пусковая установка отрабатывает задающий сигнал до тех пор, пока оператор не снимет его. При отпускании ручек ПН корпус его под действием пружины возвращается в исходное положение. Угловая скорость вращения башни ПУ пропорциональна углу поворота ручек ПН.
Работа приводов ВН и ГН в автоматическом режиме.
Переход в автоматический режим осуществляется при автоматическом сопровождении цели ГСН включением на пульте оператора ПО-2 тумблера СЛЕЖЕНИЕ в положение АВТОМАТ (рис.10) и удержанием гашетки в нажатом положении. При этом управляющий сигнал поступает не с ПН, а с ГСН ракеты. В остальном работа приводов аналогична работе в полуавтоматическом режиме.
Рис. 10 . Пульт оператора ПО-2
Таким образом, при боевой работе оператор в режиме БОРТ рукоятками управления ПН наводит ПУ на цель и переходит в режим СЛЕЖЕНИЕ. При этом сигнал для управления приводами поступает с ГСН ракеты, и ПУ будет автоматически сопровождать цель. В режиме ПУСК приводы автоматически отрабатывают углы упреждения, выработанные в АОЗ, и разворачивают ПУ в упрежденную точку.
В полуавтоматическом режиме тумблер СЛЕЖЕНИЕ на ПО-2 переключается в положение РУЧНОЕ. Оператор все операции по сопровождению цели в режиме СЛЕЖЕНИЕ и вводу углов упреждения в режиме ПУСК осуществляет вручную.
Электропривод механизма перевода обеспечивает перевод ПУ из походного положения в боевое и обратно. Он установлен в башне ПУ сзади оператора. Работу механизма обеспечивает электродвигатель.
Механизм перевода имеет ручной дублер, позволяющий расчету с помощью специальной рукоятки вручную переводить ПУ в боевое и походное положения. Для этого необходимо вставить рукоятку в гнездо хвостовика ручного дублера (рис.11) и включить тумблер ПРИВОД на ПО. Вращением рукоятки ручного дублера по ходу часовой стрелки (против хода часовой стрелки) перевести ПУ в походное (боевое) положение. После загорания лампы ПОХОД (подсветки шкалы вольтметра) на ПО рукоятку повернуть дополнительно на 0,5-1 оборот.
Рис. 11 . Рукоятка ручного дублера механизма перевода
После завершения перевода ПУ в боевое или походное положение осуществляется ее стопорение стопорами.
4. Система электропитания
Система электропитания (СЭП) предназначена для обеспечения электрической энергией всей аппаратуры боевой машины.
— две аккумуляторные батареи 6СТ-140;
— фильтр радиопомех Ф5;
Генератор Г6,5С является основным источником электроэнергии. Он установлен слева от рабочего места командира и соединен ременной передачей с валом двигателя БМ. Генератор вырабатывает напряжение 28 В, его мощность — 6,5 кВт.
Аккумуляторные батареи 6СТ-140 являются резервным источником питания. Напряжение одной батареи 12 В. Батареи соединены последовательно, суммарное напряжение на двух батареях составляет 24 В. Емкость каждой батареи 140 А/час. При работающем базовом двигателе АКБ подключаются к генератору и работают в режиме подзаряда. При неработающем двигателе аккумуляторные батареи работают в режиме разряда (при включенной аппаратуре). Батареи установлены в кормовой части БМ над АКБ МТ-ЛБ.
Реле-регулятор Р-10ТМУ предназначено для автоматического поддержания напряжения генератора в пределах 26,5-28,5 В при изменении оборотов двигателя. Установлено справа от оператора на борту БМ.
Фильтр радиопомех Ф5 служит для подавления радиопомех, создаваемых генератором. Установлен рядом с реле-регулятором.
Коммутационное устройство предназначено для включения СЭП и переключения режимов работы. Состоит из выключателя массы и трех контакторов. Выключатель массы с вольтметром ВА-180 установлен на щитке слева перед механиком-водителем. Контакторы размещены справа от оператора рядом с реле-регулятором. С помощью вольтметра ВА-180 контролируется напряжение на АКБ и наличие зарядного тока.
Предохранитель ИП-150 служит для защиты АКБ в случае короткого замыкания цепи.
При включенном базовом двигателе БМ СЭП работает от генератора, время работы неограниченно. Если базовый двигатель БМ не используется, то СЭП работает от АКБ, время работы – несколько часов.
В БМ предусмотрена возможность подключения к СЭП системы внешнего электропитания 9И111 (рис. 12). Подключение производится с помощью кабеля, который подсоединяется к разъёму на правом борту БМ. Внешний источник питания заменяет генератор Г6,5С.
При работе от ВИП подзаряжаются только АКБ СЭП пусковой установки. Подзаряд батарей базовой машины не осуществляется.
Рис. 1 2 . Система внешнего электропитания 9И111
Оптический визир на ЗРК «Стрела-10» предназначен для :
Точного опознавания воздушной цели; определения цели относительно границ зоны пуска; ввода упредительной точки воздушной цели.
Точного наведения ПУ на цель; определения надежности захвата цели ГСН; определения момента пуска ракеты; ввода углов упреждения ПУ перед пуском (в ручном режиме); наблюдения сигналов ПРП.
Точного определения пассивным радиопеленгатором (ПРП) воздушной цели; определения цели относительно границ зоны пуска; ввода упредительной точки воздушной цели.
Точного наведения ПУ в упрежденную точку, определения канала работы ГСН ; определения цели относительно границ зоны пуска; ввода упредительной точки воздушной цели.
Танковая навигационная аппаратура ТНА-3 на ЗРК «Стрела-10» это:
Счетно-решающий прибор предназначенный для непрерывной автоматической выработки реперной точки и ориентирования БМ на месте.
Счетно-решающее устройство предназначенное для непрерывной выработки сигнала ЗОНА для определения границ зоны пуска комплексом.
Счетно-решающий комплекс, предназначенный для непрерывной автоматической выработки текущих координат, дирекционного угла БМ и угла направления на пункт назначения.
Счетно-решающий комплекс, предназначенный для непрерывного автоматического опознавания воздушной цели.
Для приема ЦУ и ориентирования ПУ на ЗРК «Стрела-10» при боевой работе совместно с ТНА-3 работает:
Указатель азимута.
Указатель угла места.
Указатель дальности.
Указатель скорости.
В состав электропривода вертикального наведения на ЗРК «Стрела-10» входят:
задающий потенциометр; блок управления приводом; блок усилителей ВН; исполнительный двигатель с тахогенератором (ТГ).
задающий потенциометр; блок управления приводом; блок усилителей ВН; исполнительный двигатель с тахогенератором (ТГ) и потенциометром обратной связи (ПОС).
задающий потенциометр; блок управления приводом; блок усилителей ВН; исполнительный двигатель с обратной связи (ПОС).
задающий потенциометр; блок управления приводом; блок усилителей ВН; исполнительный двигатель.
Блок усилителей ВН и блок усилителей ГН на пусковой установке ЗРК «Стрела-10» предназначен для:
Окончательного усиления сигналов по мощности.
Окончательного усиления сигналов по амплитуде.
Окончательного усиления сигналов по частоте.
Окончательного усиления сигналов по скорости.
Поле зрения оптического визира на ЗРК «Стрела-10» составляет:
по азимуту — 35°; по углу места — 28°; увеличение — 1,8 раза; напряжение питания – 24 В.
по азимуту — 25°; по углу места — 18°; увеличение — 2,8 раза; напряжение питания – 12 В.
по азимуту — 45°; по углу места — 38°; увеличение — 2,8 раза; напряжение питания – 32 В.
по азимуту — 55°; по углу места — 48°; увеличение — 1,8 раза; напряжение питания – 16 В.
В состав танковой навигационной аппаратуры (ТНА) на ЗРК «Стрела-10» входят:
Датчик скорости, навигатор, курсоуказатель, гирокурсоуказатель, пульт наведения, преобразователь ПТ — 500Ц.
Датчик времени, навигатор, курсоуказатель, гирокурсоуказатель, пульт наведения, преобразователь ПТ — 300Ц.
Датчик пути, координатор, курсоуказатель, гирокурсоуказатель, пульт управления, преобразователь ПТ — 200Ц.
Датчик дальности, координатор, азимутальный датчик, угломестный датчик, пульт управления, преобразователь ПТ 200Ц.
Электрический привод ПУ на ЗРК «Стрела-10» предназначен для:
Перевода ТНА-3 из походного положения в боевое и обратно, наведение НРЗ на цель для ее опознавания.
Перевода пассивного радиопеленгатора (ПРП) в рабочее положение, наведения НРЗ нацель для ее опознавания.
Перевода ПУ из походного положения в боевое и обратно, наведение башни в горизонтальной плоскости, наведение люльки в вертикальной плоскости.
Управления БМ при пуске ракеты, стопорения башни в походном положении, перевода вспомогательных систем в боевое положение.
Блок управления приводами на ЗРК «Стрела-10» предназначен для:
Управления приводами вертикального наведения (ВН) и приводами горизонтального наведения (ВН).
Управления приводами вертикального наведения (ВН) и приводами горизонтального наведения (ВН).
Управления приводом вертикального наведения (ВН), приводом горизонтального наведения (ВН), приводом перевода.
Предварительного усиления управляющих сигналов по мощности.
Микровыключатель 20° электрического привода наведения на ЗРК «Стрела-10» предназначен для:
Отключения привода ВН на минимальном угле 20° .
Обеспечения электрического торможения двигателя привода ВН при подходе люльки к минимальному углу 20°.
Выработки сигнала «НИЗ» при угле люльки 20° и меньше.
Отключения привода ВН на максимальном угле 20°.
Наппа, блокировки и танковый разворот: тест-драйв внедорожника Tank 300

Горная Хакасия, массив Сундуки. Крутой подъем и колея с глубокими промоинами, ведущая на вершину. Кажется, будет трудно – ведь в каждой такой промоине автомобиль попадает на диагональное вывешивание. Но Tank 300 со всеми заблокированными дифференциалами ползет вверх на пониженной передаче так, будто бы едет по асфальту…
Казалось бы, легковой автомобиль рамной конструкции – это самый что ни есть настоящий анахронизм. Бум цивильно-комфортабельных внедорожников давно закончился, ведь для тех, кто хочет совместить удобство повседневной езды по городу и дорогам общего пользования с возможностью выбираться на природу, есть самые разнообразные кроссоверы. И все же существует одна область, в которой рама не сдает свои позиции, и эта область – реальное бездорожье. Да, спрос на автомобили, способные его преодолевать, стал несколько меньше, но он все же есть! И далеко не все потенциальные покупатели таких автомобилей готовы смириться со спартанскими условиями в салонах своих внедорожников. Они хотят иметь возможность преодолевать препятствия, при этом продолжая оставаться в привычном для них комфорте автомобилей бизнес-класса. Вот на таких клиентов и сделало ставку руководство концерна Great Wall, выводя на рынок новый бренд Tank.



История бренда началась два года назад. Модель-первенец с индексом 300 дебютировала в составе линейки премиальной марки Wey, и всего за три месяца она вышла в топ-10 самых продаваемых моделей в Китае. Этот успех способствовал выделению Tank в самостоятельное подразделение, и в апреле 2021 года в составе GWM появился бренд с этим названием. Спустя год с небольшим, в июле 2022 года, он выходит на международный рынок: начались поставки внедорожников в Саудовскую Аравию. Всего за полтора года, к октябрю 2022-го, суммарные продажи бренда TANK с момента обретения им самостоятельности превысили 200 000 автомобилей. В ноябре руководство концерна официально объявило о своих планах по выводу внедорожников Tank на российский рынок, который был намечен на весну 2023 года. И вот в полном соответствии с этими планами мы отправляемся в маршрут по горной Хакасии на новеньких Tank 300.

В принципе, мы уже публиковали достаточно подробное описание этого автомобиля, но одно дело – читать описания и рассматривать фотографии, и совсем другое – смотреть собственными глазами и щупать своими руками. На всякий случай напомним, что Tank 300, помимо рамы лестничного типа с продольными лонжеронами сечением 130х160 мм из высокопрочной стали с повышенными упругими свойствами, оснащается безальтернативной двухлитровой бензиновой «турбочетверкой» E20CB мощностью 220 л.с и полкой крутящего момента в 380 Нм (в диапазоне от 1800 до 3600 оборотов), 8-ступенчатым гидромеханическим автоматом ZF и раздаточной коробкой типа part-time с жестко подключаемым передним мостом и понижающей передачей (передаточное отношение 2.48). Передняя подвеска – независимая, пружинная, на поперечных рычагах со стабилизатором поперечной устойчивости. Задняя подвеска – зависимая, пружинная, на продольных рычагах с тягой Панара и стабилизатором поперечной устойчивости.


Рама имеет деформируемые зоны, да и вообще с безопасностью у Tank 300 порядок: есть и полный комплект подушек безопасности, и преднатяжители ремней, и автоматическое отключение подачи топлива в случае аварии. Кузов сделан очень жестким, чтобы сохранить целостность в случае переворота. В результате на независимых тестах австралийской организации ANCAP Tank 300 уверенно заработал 5 звезд, в том числе – за безопасность пешеходов, хотя, как правило, у внедорожников этот показатель достаточно низок.


Ну а теперь – личные впечатления. Прежде всего Tank 300 не производит впечатления громоздкого автомобиля, и в этом нет ничего удивительного: как по продольному габариту, так и по колесной базе он практически не отличается от хорошо знакомого россиянам Great Wall Hover (он же – Haval H5). Правда, Tank на 130 мм шире и на 220 мм выше. Весьма показательно и сравнение с другим популярным у нас рамным внедорожником, Mitsubishi Pajero Sport: Tank 300 уступает ему в длине чуть более 200 мм, но превосходит по ширине на 155 и по высоте на 95 мм. В общем, Tank 300 не слишком длинный, но широкий, высокий и… квадратный.





И если говорить о внешности, то у меня сразу возникли ассоциации с Ford Bronco 6-го поколения. Этот автомобиль явно стал источником вдохновения для дизайнеров, занимавшихся разработкой внешнего облика Tank 300. И дело не только в круглых фарах, перечеркнутых горизонтальными полосками светодиодных дневных ходовых огней – скорее, дело в общих пропорциях, похожих очертаниях и брутальности облика. А брутальности этой – хоть половником черпай: штатные подножки (без которых попадать в салон было бы действительно непросто), бамперы и расширители колесных арок из неокрашенного черного ABS-пластика, распашная задняя дверь с по-джиперски подвешенным запасным колесом…










Кстати, такое решение – не просто дизайнерский ход. Оно позволяет уменьшить задний свес (а это очень важно для обеспечения геометрической проходимости), а также облегчает доступ к запаске в том случае, если вы пробьете колесо в глубокой грязи. Каждый, кому доводилось в такой ситуации извлекать запаску из-под заднего бампера того же Land Rover Discovery, такое решение однозначно одобрит. Единственный вопрос, который у меня возник: насколько мощными сделали петли задней двери и не начнут ли они провисать под весом массивного запасного колеса. Не случайно в свое время владельцы многих внедорожников с такой схемой размещения запасного колеса (к примеру, Nissan Patrol Y60 и Y61 или Land Rover Discovery 1 и 2) переносили его на так называемую «калитку», то есть поворотный кронштейн из труб, опирающийся на бампер.

Ну и чтобы завершить разговор о геометрических параметрах проходимости, отметим, что Tank 300 в этом вопросе занимает место в рядах отличников. Во-первых, у него практически равные углы въезда и съезда, 33 и 34 градуса. Это означает, что если передний бампер прошел через препятствие, то задним бампером вы точно ни за что не зацепите. В этом плане Tank выгодно отличается даже от такого эталона внедорожных талантов, как Jeep Wrangler, у которого угол въезда лучше (42 градуса), а вот угол съезда – всего 33, так что протащить передок и зацепить какой-нибудь валун задним свесом очень даже реально. В любом случае, когда я решил сфотографировать автомобиль рядом с менгирами (менгиры – это простейшие мегалиты, каменные глыбы, установленные древними людьми в незапамятные времена, и в Хакасии их великое множество), и мне пришлось пересечь пару довольно крупных канав, никаких сложностей я не испытал и грунт бамперами не зацепил. Впрочем, если бы и зацепил – ничего страшного бы не произошло: и под двигателем, и под коробками размещена стальная защита.

Ну и в завершение внешнего осмотра заглянем под капот и в багажник. Чтобы открыть капот, не нужно нащупывать пальцами фиксатор – его просто нет, а сам капот фиксируют пневмоупоры. Тут стоит обратить внимание на два момента: во-первых, на очень солидную шумовиброзащиту, установленную и на самом капоте, и на моторном щите, а во-вторых, на то, как организован забор воздуха для двигателя. Он расположен в очень защищенном от брызг месте подкапотного пространства, за правой фарой, и сам воздухозабор смотрит вбок, на крыло. Поэтому шанс хлебнуть воды мотором снижается, даже если вы заедете в глубокий брод. А заявленная глубина преодолеваемого брода составляет у этого автомобиля 700 мм – для сравнения, у классического Land Rover Defender и наших УАЗов она на 200 мм меньше.

Впрочем, будущим пользователям Tank 300, планирующим преодолевать экстремальное бездорожье, стоит подумать об установке шноркеля, и вот это может оказаться не так уж и просто. Это вам не старина Деф, штатный шноркель которого просто прикручивается тремя болтами к существующему окошку за правым крылом… Думаю, и с поиском готовых решений в России будут определенные проблемы, и все придется либо изобретать с нуля, либо закупать готовым: в Китае такие решения уже предлагаются. Например, там доступен Tank 300 Frontier Edition, оснащенный шноркелем, лебедкой (встроенной в штатный бампер) и колесами с бедлоками, которые предотвращают разбортирование при езде на сверхнизком давлении в шинах.

Есть и еще один момент – подготовка Tank 300 к экстремальным внедорожным приключениям обязательно должна будет подразумевать вывод вентиляции картеров мостов и коробок на приличную высоту. Сейчас сапуны установлены непосредственно на агрегатах, и этого вполне достаточно для кратковременного форсирования водных преград. Но если автомобилю случится застрять в серьезном броде, то быстро остывающий агрегат начнет буквально тянуть в себя воду, что означает обязательную смену масла после возвращения в «тепличные» условия.
Ну а теперь пора, как говорят моряки, «осмотреться в отсеках». Внутреннее оформление Tank 300 вполне соответствует внешности: много прямых линий и окружностей, много относительно ровных плоскостей и очень мало плавных кривых. Добавляют брутальности и круглые сопла вентиляционных дефлекторов, похожие на сопла реактивных двигателей, и особенно – нарочито грубые металлические головки винтов со шлицовкой типа Torx, которыми крепятся ручки, расположенные и на дверях, и перед передним пассажиром. Ручек здесь вообще много: помимо стандартных верхних есть ручки на передних стойках и вертикальные на центральных стойках для удобства задних пассажиров.











Создатели Tank 300 не стали следовать модной тенденции сосредотачивать все управление функциями автомобиля на сенсорном дисплее головного устройства. Может быть, это удешевляет конструкцию и нравится гаджетоманам – но на мой взгляд, это очень плохая и опасная тенденция. Так что два больших блока физических клавиш справа и слева от селектора автомата, блок клавиш управления климатом на центральной консоли и дополнительный блок слева от руля здесь более чем уместны.



Особенно важны кнопки справа от селектора: они отвечают за блокировки переднего и заднего дифференциалов, режим «танкового разворота» и внедорожный круиз-контроль (официально он называется «ассистент движения на малой скорости»), ну и «до кучи» здесь же есть кнопка принудительного включения системы кругового обзора, в которую интегрирована функция «прозрачного капота». Перед этим блоком – ротор-контроллер управления режимами раздаточной коробки. Их всего три: задний привод (2H), полный привод с верхним рядом передач (4H) и включение понижающей передачи (4L).

В левом блоке клавиш – режим «Снег» (его можно включить только в случае движения в режиме 4H), экспертный режим (который позволяет сконфигурировать все параметры работы систем автомобиля, включая ESP и отклик на нажатие педали газа под себя), клавиша управления электронным тормозом и включения режима Auto Hold. Ну а перед этим рядом кнопок – еще один ротор-контроллер, который включает предустановленные режимы движения на бездорожье – «Стандарт», «Грязь/Песок», «Ухабы», «Камни»… Все эти режимы работают только при включенной пониженной передаче, но вот все остальное будет сделано за вас. Например, режим «Камни», который мы включали при подъеме на массив Сундуки, автоматически заблокирует дифференциалы и оставит коробку на первой передаче.

Есть еще один блок кнопок, слева от руля. Две из кнопок этого блока отвечают за яркость приборной панели и регулировку фар, а вот две другие опять-таки нужны при движении вне асфальта. Одна отключает ESP (напомню, что на бездорожье отключение системы стабилизации является насущной необходимостью, иначе она может «задушить» двигатель в самый неподходящий момент, а вторая включает ассистент спуска по склону.

А вообще водитель Tank 300 чувствует себя очень комфортно. Профиль сиденья – вполне удобный, подушка достаточно длинная (что даже удивительно для китайского автомобиля), диапазон регулировок более чем достаточный, а руль регулируется как по углу, так и по вылету. Имеется и регулировка поясничного подпора, причем как по выраженности, так и по высоте. Правда, такая роскошь предоставлена только водителю, зато трехуровневый обогрев есть и у водителя, и у всех пассажиров. Сиденья обиты отличной перфорированной кожей наппа (без перфорации тут было никак не обойтись, поскольку сиденья первого ряда снабжены как обогревом, так и вентиляцией. Обзорность – отличная: сидишь высоко, площадь остекления большая, и даже достаточно массивные передние стойки не слишком мешают по причине малого угла наклона. Боковые зеркала – крупные, я бы сказал – «грузового» типа.





Завершает картину правильный «внедорожный» руль без эргономических наплывов, но с удобным сечением, обтянутый «цепкой» качественной кожей. Такой руль удобно перекладывать «от упора до упора», а именно на бездорожье этим приходится заниматься достаточно регулярно. Пришлось и нам в засыпанном снегом поселке Приисковый… Кстати, именно там автомобиль все-таки стащило с более-менее плотной, хоть и засыпанной снегом дороги в глубокую снежную ловушку, и для того, чтобы выбраться, пришлось помахать лопатой, хотя буксир все-таки не понадобился.

Подрулевые рычажки имеют вполне традиционные функции и не требуют никакого привыкания, но все дело в том, что их не два, а три. Слева, под переключателем, управляющим светом и поворотниками, есть еще один, на который выведено управление активным круиз-контролем, и вот с ним нужно познакомиться очень внимательно: пользоваться им придется вслепую, наощупь.



А вот что мне не очень понравилось, так это приборная панель – точнее, заменяющий ее дисплей. С одной стороны, он довольно информативен, и всяческой информации на него выводится очень много. Например, если подключить телефон при помощи Android Auto или Apple CarPlay и запустить тот же Яндекс Навигатор, то в центральной области этой панели будут выводиться подсказки с направлением поворотов и расстоянием до точки маневра. Но все же, как мне кажется, информация со стрелочных индикаторов воспринимается легче, чем чисто цифровая, пусть даже эти индикаторы будут нарисованными. Так ведь многие марки делают, нравятся тебе стрелки – будут тебе «нарисованные», больше нравятся цифры – тоже пожалуйста, а хочешь – все это можно совместить. Но выбора стиля приборной панели я в настройках не нашел.




Что же касается большого 12,3-дюймового сенсорного дисплея головного устройства, то и сам дисплей отличается приличным разрешением, и все его режимы организованы довольно логично. Конечно, нужно поначалу не сразу получалось переключаться между основным меню и экраном интегрирующего приложения (в моем случае – Android Auto), но освоить эти премудрости можно довольно быстро.


На втором ряду сидений места на удивление много. На удивление – потому что задняя дверь даже внешне кажется довольно узкой, да и забирающимся на свои места пассажирам тоже нужно соображать, какую ногу занести в салон первой. Но сам за собой я сел вообще без проблем, от спинок передних сидений мои колени отделили 7-8 сантиметров, а голову от потолка – вообще сантиметров 20, хоть в шляпе сиди. Опять же, тоннеля под ногами нет, зато спинки сидений регулируются по наклону, есть подогрев, два слота USB и возможность управлять потоками воздуха из дефлекторов.





Осталось заглянуть в багажник. Он не слишком велик – всего 410 литров, но в нем есть ниша для мелочей с сеточкой, карман из сетки на задней двери и фальшпол, где притаился сабвуфер, и есть место не только для домкрата и ключей, но и для автохимии. Есть и подсветка, и розетки на 12 и 220 вольт, и петли для фиксации груза. Кстати, дверь снабжена мощным пневмоупором с фиксатором, и это правильно: мало того, что дверь тяжелая сама по себе, так на ней еще и запаска висит. Спинки задних сидений, естественно, складываются, образуя ровную площадку. Но увы, длина этой площадки не слишком велика, так что холодильник или стиральную машину можно перевезти без проблем, а вот устроиться на ночлег с комфортом уже не получится, по крайней мере людям среднего и более высокого роста.


Багажник обит ворсистым материалом, и вот это решение имеет как плюсы, так и минусы: грязные сапоги сюда не бросишь. Но если емкости багажника вам категорически не хватает, то есть не только рейлинги, но и возможность тянуть прицеп. Достаточно снять накладку в центре заднего бампера и открыть доступ к готовым закладным устройствам и готовой проводке под тягово-сцепное устройство.




Ну а теперь о том, каков Tank 300 на ходу. В городе автомобиль ведет себя вполне ожидаемо: особой резвости не демонстрирует, но в потоке держится легко. Нет и никаких проблем с перестроениями, за исключением одной: до самого конца теста я так толком и не смог привыкнуть к тому, как работает подрулевой переключатель поворотников. У него, как на автомобилях BMW, нет фиксированного положения, в котором с характерным щелчком указатель поворота включается в постоянную работу. Хочешь моргнуть три раза (а такой режим тоже есть), а поворотник начинает работать постоянно, причем выключить его тоже получается не сразу, а иногда и вовсе включается сигнал поворота в противоположную сторону.


На трассе автомобиль вполне устойчив даже в режиме заднего привода, но вот подвеску никак нельзя назвать «суперкомфортной». Стыки, бугры и ямки вполне отчетливо передаются на раму, с нее на кузов и в итоге доходят до вашего позвоночника. Но назвать Tank 300 «костотрясом» все же было бы несправедливо – ездовой комфорт вполне на уровне лучших рамных внедорожников с пружинной подвеской. Зато энергоемкость подвески впечатляет, «дубасить» по кочкам можно совершенно спокойно. Еще раз убедился, что сочетание плавности хода с внедорожными талантами может обеспечить только пневмоподвеска, у которой есть свои проблемы (в частности, с надежностью и ценой ремонта). Ну а мощности двигателя вполне хватает для любых обгонов, хотя, конечно, стоит помнить, что тяжелый рамный внедорожник (вес Tank 300 составляет 2,2 тонны) – это совсем не спорткар.

Китайцы, конечно же, оснастили автомобиль некоторым набором электронных помощников водителя, в том числе – ассистентом удержания в полосе с функцией уклонения. Работает эта функция так: если вы едете себе в своей полосе, никого не трогаете, а автомобиль в соседнем ряду вдруг начинает на вас «наваливаться». Так вот, от такого сближения Tank 300 уклонится без вашего вмешательства. Но вообще набор ассистентов выглядит достаточно скромным, особенно по сравнению со многими кроссоверами китайских брендов: активный круиз, вот эта система контроля движения в полосе, система распознавания дорожных знаков ограничения скорости (которая действительно работает, хотя и не всегда), ну и парктроники с системой автоматического торможения при движении на малой скорости.
Но по сухому асфальту проходила лишь не самая большая часть нашего маршрута. Десятки километров пришлись на снежный накат и обледеневший грейдер, и в таких условиях, естественно, я предпочитал включить режим 4H. Широко бытует мнение, что в случае внедорожников с жестко подключаемым передним мостом задействовать режим 4H на асфальте категорически нельзя, поскольку это чревато циркуляцией паразитной мощности в трансмиссии, растяжением цепи и дорогостоящим ремонтом раздаточной коробки. Это действительно так, но только в том случае, если речь идет о сухом или просто мокром асфальте. А вот если есть снежный накат или лед, и колеса имеют возможность относительной пробуксовки, то включать полный привод и можно, и нужно, тем более что здесь это можно проделывать на скорости до 80 км/ч. Правда, и двигаться придется с этой скоростью, иначе на приборной панели постоянно будет появляться соответствующее предупреждение. Впрочем, если вы готовы рискнуть техническим здоровьем своего автомобиля, то можно и до сотни разогнаться, и даже быстрее ехать – траекторная устойчивость останется на высоте. Стоит только помнить, что в этом режиме для автомобиля характерна недостаточная поворачиваемость, и в поворотах он стремится продолжить движение по прямой.

Обязательно стоит сказать несколько добрых слов об акустическом комфорте. В салоне действительно довольно тихо – не слышно ни гудения шин, ни рева двигателя. Главным компонентом шума становятся аэродинамические шумы, и с этим ничего не поделать: по аэродинамике Tank немногим превосходит шкаф. Шумят крупные зеркала с прямоугольными корпусами, встречный ветер упирается в лобовое стекло и срывается вверх (и то, как автомобиль рвет воздух, ты чувствуешь почти физически). Особо сильный аэродинамический шум слышен при открытой шторке люка на крыше. Закроешь шторку – шума становится существенно меньше, но он все равно остается и раздражает. Остается только включить погромче вполне пристойную акустическую систему Meridian.

Tank 300 радует маневренностью, но в самых критических ситуациях можно задействовать режим «танкового разворота». Вот представьте, что вы едете по узкой лесной дорожке и уткнулись в непреодолимое препятствие – глубокий ров или бетонные блоки… Нужно разворачиваться, но обочин нет, и вплотную к дороге растут деревья. Я в такую ситуацию попадал, например, когда путешествовал по заброшенным объектам первой системы ПВО Москвы. И вот тут вы можете включить пониженный ряд, ассистент движения на малой скорости и нажать на клавишу, активирующую этот самый «танковый разворот». Автомобиль жестко затормозит заднее, внутреннее по отношению к развороту колесо, и радиус разворота сократится метра на два. Так что в сочетании с системой кругового видеообзора маневры в ограниченном пространстве парковок не представляют никаких проблем.
Танки и танковые войска. Ч.1 Бронированные машины
Для повышения боеготовности и боеспособности боевых машин в конструкции современных иностранных танков широко применяется автоматика. Теперь боевые качества танка в значительной степени зависят от совершенства и надежности установленных в нем электрических автоматических систем, а также отдельных электрических машин, приборов и аппаратов.
Характерной особенностью системы электрооборудования современного танка являются ее насыщенность мощными потребителями электрической энергии и вызванное этим значительное увеличение мощности источников электрической энергии.
Увеличение количества и мощности потребителей электрической энергии в танке объясняется теми преимуществами, которыми обладают электрическая энергия и электроприводы по сравнению с другими видами энергии и другими видами исполнительных (силовых) приводов, например, гидравлическим или пневматическим.
Применение электрической энергии для управления исполнительными (силовыми) приводами обеспечивает возможность осуществления дистанционного управления, что позволяет понизить вес и упростить конструкцию всей системы исполнительного привода. Электрическая система управления исполнительным приводом в свою очередь позволяет наиболее эффективно осуществить его автоматизацию с помощью простых средств и схемных решений. Автоматизация приводов повышает их быстродействие, улучшает характеристики и обеспечивает максимальные удобства при применении.
Электрооборудование танков развивалось одновременно с развитием конструкций танков, танкового оружия и танковых двигателей. Несмотря на то что процесс развития и усовершенствования протекал в течение многих лет, принципиальная схема электрооборудования танка оставалась почти без изменений. До сих пор на танках применяется система электрооборудования постоянного тока напряжением 26±4 в, обладающая следующими существенными достоинствами:
— система является наиболее отработанной и изученной. Стандартизация номинальных напряжений обеспечила возможность создания унифицированных двигателей, контакторов, реле и другой аппаратуры;
— простота системы, которая обусловлена возможностью ее выполнения по однопроводной схеме;
— безопасность работы экипажа при принятом номинальном напряжении бортовой сети;
— большие значения пусковых моментов у приводных электродвигателей постоянного тока;
— возможность работы генератора в режиме электродвигателя при применении его в качестве стартера;
— возможность непосредственного привода генератора от двигателя танка (без муфты постоянной скорости).
Учитывая непрерывное возрастание суммарной мощности электрооборудования танка, числа потребителей тока, сопровождающееся увеличением протяженности линий передач электрической энергии, и широкое применение потребителей переменного тока, можно сделать вывод, что возможности дальнейшего развития данной системы электрооборудования ограничены. Основными недостатками системы электрооборудования на постоянном токе являются:
— наличие щеточно-коллекторного узла в электрических машинах;
— трудность выполнения жидкостного охлаждения генератора постоянного тока;
— необходимость установки преобразователей тока для получения переменного тока необходимых параметров;
— увеличение веса системы электрооборудования при сохранении номинального напряжения бортсети 26±4 в.
При увеличении мощности электрооборудования танка и протяженности линий электропередач выше определенных пределов целесообразно повысить номинальное напряжение до некоторого оптимального значения, при котором может быть понижен вес проводов и отдельных элементов электрооборудования.
Установлено, что вес отдельных элементов электрооборудования танка при повышении номинального напряжения изменяется неодинаково: вес одних элементов снижается, а других увеличивается. Так, например:
— вес генераторов, электрических двигателей и различной арматуры несколько понижается;
— вес аккумуляторной батареи данной емкости заметно увеличивается;
— вес электрических проводов в силовых цепях, по которым передается энергия для питания мощных потребителей, значительно понижается; вес проводов, по которым проходят небольшие токи, изменяется мало, так как их сечение выбирается не по допустимой нагрузке или падению напряжения, а из соображений механической прочности провода.
Кроме того, при дальнейшем увеличении номинального напряжения сокращаются сроки службы малогабаритных ламп накаливания, так как нити ламп для увеличения сопротивления приходится делать более тонкими, что сильно уменьшает их механическую прочность.
Эти противоречивые обстоятельства вынуждают конструкторов при компоновке системы электрооборудования танка для получения нужных рабочих напряжений в отдельных системах применять электромашинные преобразователи напряжения, а для получения переменного тока — электромашинные преобразователи тока, что увеличивает вес, габариты и стоимость системы электрооборудования.
Напряжение бортовой сети танка выше 30 в нецелесообразно, так как это не решит все поставленные вопросы, а необходимость питания потребителей переменным током вновь потребует установки преобразователей тока.
Основываясь на опыте развития электрооборудования, можно сказать, что система электрооборудования танка на постоянном токе отвечает требованиям сегодняшнего дня. При дальнейшем расширении системы электрооборудования танка и более интенсивном внедрении потребителей переменного тока не исключено, что традиционная система постоянного тока будет соответствующим образом реконструирована.
Танковые генераторы. Генератор является основным источником электрической энергии в танке.
Конструкция танковых генераторов отличается характерными особенностями, обусловленными необходимостью установки их на танке в весьма ограниченном по размерам и труднодоступном месте. Поэтому танковый генератор должен иметь незначительные габариты и обладать высокой надежностью, при которой обеспечивается его нормальная работа в течение всего гарантийного срока без обслуживания и замены щеток.
Танковый генератор работает в тяжелых условиях, которые отличаются интенсивной тряской и вибрациями мест крепления генератора, повышенной температурой (до 105°С) и сильной запыленностью.
Мощность танковых генераторов постоянного тока непрерывно растет и в настоящее время достигает 15 квт. При увеличении мощности танковых генераторов постоянного тока труднее создать надежный щеточно-коллекторный узел, так как при этом увеличивается масса коллектора, затрудняется обеспечение его механической прочности, увеличиваются потери в щеточно-коллекторном узле, что вызывает нагрев щеток, максимальная температура которых не должна превышать 180—220°С. При превышении этой предельной температуры коммутация ухудшается, а щетки быстро изнашиваются.
Увеличение мощности танковых генераторов постоянного тока сопровождается непрерывными усовершенствованиями их конструкции и улучшением охлаждения, что положительно сказывается на коммутации.
Необходимость уменьшения габаритов и веса танкового генератора постоянного тока требует увеличения начальной и максимальной скорости вращения его вала. Это приводит к дополнительным потерям на коллекторе и ухудшению коммутации, быстрому износу щеток и необходимости повышения механической прочности коллектора, а также применения подшипников повышенной надежности. Кроме того, наличие щеточно-коллекторного узла ограничивает возможность применения более эффективной жидкостной системы охлаждения генератора.
Таким образом, увеличением скорости вращения вала танкового генератора постоянного тока нельзя обеспечить создание генератора большой мощности и необходимой надежности.
Опыт применения генераторов переменного тока на автомобилях и в авиации показал, что синхронные генераторы свободны от этих недостатков. Надежность авиационного генератора переменного тока в два раза выше надежности генератора постоянного тока. Удельная мощность автомобильного генератора переменного тока в 1,5 раза выше, чем у генератора постоянного тока (из-за значительного снижения его веса).
Максимальная скорость вращения якоря генератора переменного тока ограничивается только подшипниками, и при принудительной смазке его жидкими маслами она может достигать весьма больших значений.
Большое влияние на размеры генераторов и их характеристики оказывает способ регулирования напряжения, точнее, определяемая с помощью этого способа величина тока возбуждения генератора. Применение вибрационных регуляторов напряжения вызывало необходимость уменьшения тока возбуждения генератора до такой величины, при которой обеспечивалась нормальная работа контактов регулятора напряжения. Это приводило к тому, что магнитные цепи генераторов были слабо насыщены, а это ухудшало показатели электромагнитного использования железа генератора. Этот недостаток устранялся разделением обмотки возбуждения на две параллельные ветви и включением в каждую из них собственного регулятора напряжения. В результате cyммарный ток возбуждения генератора увеличивался вдвое, что увеличивало насыщение магнитной цепи генератора.
Применение вибрационных регуляторов для регулирования напряжения танковых генераторов в значительной степени понижает надежность работы генератора как основного источника электрической энергии.
Главным недостатком вибрационных регуляторов является нестабильность их регулировки. Величина напряжения, на которое был отрегулирован регулятор напряжения, с течением времени изменяется из-за износа контактов, старения пружин и подвески якорька. Кроме того, наблюдается перегрев и старение изоляции основных обмоток регуляторов напряжения, а обеспечить надежную термокомпенсацию регуляторов напряжения при изменении окружающей температуры от −40 до +70°С очень трудно.
Поэтому было бы целесообразно отказаться от вибрационных регуляторов напряжения и перейти на бесконтактные транзисторные регуляторы напряжения, не ограничивающие величину тока возбуждения генератора.
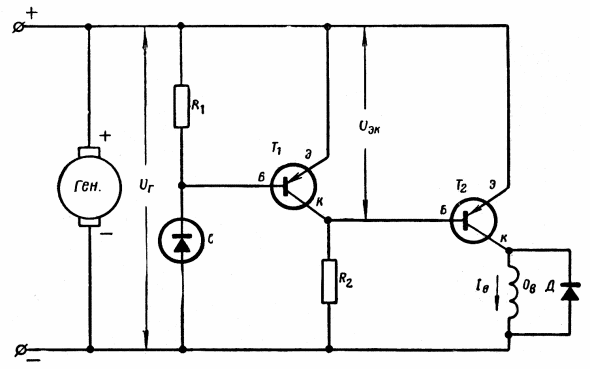
Принципиальная схема бесконтактного транзисторного регулятора напряжения генератора постоянного тока (рис. 72) состоит из измерительного устройства (ИУ), составленного из сопротивлений R1, R2, управляемого транзистора T1 и стабилитрона С, и из регулирующего устройства (РУ), воздействующего на цепь возбуждения, функции которого выполняет транзистор Т2.
Напряжение генератора Uг подается на вход измерительного устройства. Выходным напряжением измерительного устройства является напряжение Uэк, снимаемое с зажимов Э и К транзистора Т1. К выходу измерительного органа подключен транзистор Т2, в цепь коллектора которого включена обмотка возбуждения генератора.
Транзистор Т2 является переменным сопротивлением, величина которого изменяется в широких пределах. Когда транзистор Т2 открыт, его сопротивление равно сотым долям ома, а когда закрыт, оно достигает сотен тысяч ом.
Для того чтобы транзистор Т2 находился в открытом состоянии, необходимо на его эмиттерный переход (эмиттер-база) подать определенное отпирающее напряжение.
До тех пор, пока напряжение генератора будет ниже напряжения пробоя стабилитрона С, ток через него проходить не будет. Поэтому на сопротивлении R1 не будет падения напряжения. При этом потенциалы базы и эмиттера транзистора Т1 будут одинаковы, вследствие чего транзистор Т1 будет заперт. Поскольку сопротивление транзистора Т1 в этот момент будет неизмеримо больше сопротивление R2, то можно считать, что почти все напряжение генератора будет приложено к зажимам Э и К транзистора T1. Это же напряжение прикладывается к зажимам Э и Б транзистора T2.
Транзистор Т2 отпирается, и через него будет проходить ток возбуждения Iв генератора.
Как только напряжение генератора превысит напряжение пробоя стабилитрона С, через него пойдет ток. Этот ток создает на сопротивлении R1 падение напряжения, которое прикладывается к эмиттерному переходу транзистора Т1 в отпирающем направлении, благодаря чему транзистор Т1 отпирается и его сопротивление уменьшается до ничтожно малой величины. При этом падение напряжения на транзисторе Т1 также сильно уменьшается (до нескольких десятых долей вольта).
Можно считать, что выходной сигнал измерительного органа в этот момент равен нулю. Это вызывает запирание транзистора Т2 и резкое уменьшение тока возбуждения и напряжения генератора. При этом транзистор Т1 запирается, а Т2 вновь отпирается. Этот процесс будет продолжаться с определенной частотой.
Данная схема находит все более широкое применение.
Танковые аккумуляторные батареи. Характерной особенностью современных аккумуляторных батарей, устанавливаемых на танках и автомобилях, является возможность их длительного хранения в сухом заряженном состоянии на складах (до пяти лет). Применение порошковой технологии изготовления активной массы для положительных и отрицательных пластин и использование сепараторов из мипора и мипласта (вместо деревянных) обеспечили надежную работу аккумуляторной батареи и в сильной степени уменьшили вероятность сульфатации пластин.
Отличные пусковые качества современных аккумуляторных батарей, обеспечивающих запуск танковых и автомобильных двигателей с высокой степенью сжатия в холодное время года, объясняется введением древесноорганических присадок — расширителей (гуминовой кислоты, торфяных продуктов и т. п.) в активную массу отрицательных пластин, повышающих напряжение аккумулятора при разряде. Однако эти присадки вызывают необходимость повышения зарядного напряжения. Для уменьшения их влияния в активную массу пластин вводится небольшое количество ионов кобальта или никеля, снижающих зарядное напряжение. Ионы никеля снижают потенциал отрицательных пластин, а ионы кобальта — потенциал положительных пластин. Применяемые соединения никеля безвредны для деталей аккумулятора.
Наряду с положительными свойствами свинцовых кислотных аккумуляторов необходимо отметить их существенный эксплуатационный недостаток: при понижении температуры аккумулятора условия его заряда на машине резко ухудшаются — аккумулятор не принимает заряд. Это объясняется тем, что в процессе заряда на его зажимах появляется э. д. с., направленная навстречу приложенному зарядному напряжению. Величина этой встречной э. д. с. зависит в первую очередь от плотности электролита в порах пластин и концентрации в нем ионов свинца. Разность между приложенным зарядным напряжением и встречной э. д. с. является той эффективной э. д. с., которая, так же как и внутреннее сопротивление аккумуляторной батареи, определяет скорость ее заряда. Для оценки способности аккумуляторных батарей принимать заряд при низких температурах разрабатываются специальные методы.
Сущность одного из таких методов заключается в следующем. Для контроля принимаемости заряда берется новая неиспытанная, полностью заряженная батарея с температурой электролита 21—32°С. Батарея должна заряжаться током, равным току 20-часового разряда: Iз = Iр20r. Затем батарея разряжается на 50% и охлаждается до −1°С. Охлажденная до температуры −1°С батарея включается на зарядку. Батареи, имеющие номинальное напряжение 12 в, заряжаются при напряжении 14,4 в.
Оценочным параметром принимаемости заряда является величина зарядного тока в конце десятой минуты после начала зарядки. Зная величины зарядного тока, можно получить исчерпывающие данные об эксплуатационной надежности батарей.
§ 2. АВТОМАТИКА ТАНКОВ
В танке уже давно применяются автоматические системы для регулирования скорости вращения двигателя и напряжения танкового генератора.
В последние годы были автоматизированы процессы управления вооружением танка и достигнута эффективная стабилизация танкового оружия, что обеспечило возможность ведения огня из танков с ходу. Кроме того, на танках применяются системы противоатомной защиты (ПАЗ) и противопожарного оборудования.
Стабилизаторы вооружения танков
Колебания корпуса танка затрудняют наблюдение за полем боя, поиск целей, наведение орудия в цель и наблюдение за результатами стрельбы. Это происходит потому, что при колебаниях корпуса танка поле зрения прицела, как и других оптических приборов танка, не остается неподвижным относительно местности, а непрерывно колеблется вместе с корпусом танка. Одновременно с колебаниями поля зрения прицела будет колебаться и прицельная марка. Колебания прицельной марки относительно цели значительно увеличивают ошибки при прицеливании и ухудшают результаты стрельбы с ходу по сравнению со стрельбой из танка с места.
Время запаздывания выстрелов в сочетании с угловыми колебаниями корпуса танка вызывает увеличение рассеивания снарядов и пуль и ухудшение результатов стрельбы.
Для современных танковых орудий при наличии электромагнитного спускового устройства время запаздывания выстрела составляет не менее 0,14 сек. За это время ось канала ствола успевает отклониться на значительный угол и изменить свое направление в пространстве, что вызывает значительные отклонения снарядов или пуль по высоте и направлению. Рассеивание снарядов и пуль при стрельбе из танка с ходу в несколько раз выше, чем при стрельбе из танка с места.
При угловых колебаниях корпуса танка на орудие от корпуса танка будут передаваться возмущающие моменты. Величина возмущающих моментов определяется неуравновешенностью орудия, абсолютной скоростью поворота орудия и моментом трения в опорах орудия (цапфах или погоне башни). Воздействие возмущающих моментов на орудие вызывает его поворот в опорах и изменение заданного направления оси канала ствола.
Для сохранения заданного направления орудию необходимо прикладывать к нему дополнительный (стабилизирующий) момент, равный по величине и противоположный по направлению возмущающему моменту.
Эта задача успешно решается при установке в танк специальных стабилизаторов вооружения, с помощью которых определяется направление и измеряется величина угловых отклонений орудия от заданного направления. Эти отклонения преобразуются в управляющий электрический сигнал, который в дальнейшем в исполнительном органе стабилизатора преобразуется в стабилизирующий момент, благодаря чему орудие удерживается в заданном положении.
Стабилизатор танкового вооружения представляет собой систему автоматического регулирования, реагирующую на угловые отклонения орудия от заданного направления и обеспечивающую сохранение заданного направления орудию, чем достигается повышение меткости стрельбы из танка с ходу.
Для наведения орудия на цель стабилизатор снабжается системой наведения, которая позволяет изменять заданное направление орудия.
В качестве задатчиков направления, позволяющих сохранять (задавать) любое необходимое направление орудия, во всех без исключения стабилизаторах танкового вооружения применяются гироскопические приборы — трехстепенные и двухстепенные гироскопы.
Задатчик направления закрепляется на орудии или жестко с ним связывается.
В выполненных конструкциях стабилизаторов стабилизирующие моменты (пропорциональные величине управляющих сигналов), воздействующие на орудие и башню танка, создаются электромашинными или электрогидравлическими приводами.
Принятая классификация стабилизаторов танкового вооружения помогает выявить следующие принципиальные и конструктивные особенности стабилизаторов: число плоскостей стабилизации, способы передачи воздействия от задатчика направления на объект стабилизации и тип исполнительного привода.
1. По числу плоскостей стабилизации все стабилизаторы вооружения разделяются на одноплоскостные и двухплоскостные.
2. Воздействия гироскопического задатчика направления на стабилизируемый объект в стабилизаторе вооружения могут передаваться непосредственно через соединение задатчика направления со стабилизируемым объектом с помощью механической передачи или от задатчика направления на исполнительный орган стабилизатора управляющего сигнала.
В зависимости от знака и величины управляющего сигнала исполнительный орган стабилизатора будет оказывать соответствующее воздействие на стабилизируемый объект и препятствовать его отклонению под воздействием возмущающих моментов.
Стабилизаторы, в которых задатчик направления не оказывает непосредственного воздействия на объект стабилизации, а применяется только для создания управляющих сигналов, принято называть индикаторными. Необходимым элементом такого стабилизатора является усилитель, который усиливает сигналы, выдаваемые задатчиком направления для управления исполнительными органами стабилизатора.
3. Тип исполнительного привода. Стабилизирующий момент, пропорциональный знаку и величине управляющего сигнала, полученного от задатчика направления, и силовое воздействие на объект стабилизации создаются исполнительным приводом стабилизатора вооружения.
В стабилизаторах вооружения применяются электромеханические (электромашинные) и электрогидравлические приводы.
Как уже указывалось, стабилизатор вооружения танка является системой автоматического регулирования с регулированием по отклонению. Система автоматического регулирования обеспечивает постоянство регулируемой величины при изменении возмущающих воздействий и пропорциональное изменение ее при изменении знака и величины управляющего сигнала. Система автоматического регулирования с регулированием по отклонению предусматривает последовательное выполнение следующих основных операций.
(применительно к стабилизатору вооружения танка) — задание угла возвышения орудия, т. е. задание направления оси канала ствола орудия (φзад).
(в стабилизаторе вооружения танка) — измерение отклонения оси канала ствола орудия от заданного направления, т. е. измерение угла рассогласования [Δφ = ±(φзад − φ0)]. Для этой цели необходимо ввести в систему стабилизации жесткую отрицательную обратную связь, наличие которой позволит сравнивать действительное направление орудия φ0 с заданным φзад.
. При этом физическая природа управляющего сигнала должна обеспечивать возможность его передачи в последующие элементы системы. В стабилизаторе вооружения наиболее удобным является получение электрических управляющих сигналов.
(устранение рассогласования). В стабилизаторе вооружения танка для устранения рассогласования необходимо создать стабилизирующий момент (Мс), который уравновесит возмущающий момент (Мв) и, воздействуя на орудие, возвратит его в заданное положение. Момент, действующий на орудие, равен Мо = Мс − Мв.
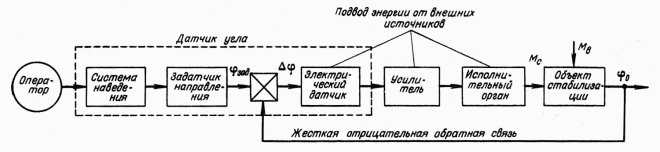
Итак, задание регулируемой величины, т. е. задание угла возвышения орудия (φзад) на движущемся танке и его стабилизация при стрельбе с ходу, является первостепенной задачей, а гироскопический задатчик направления — важнейшим элементом стабилизатора вооружения танка. Гироскопический задатчик направления вместе с электрическим датчиком (рис. 73) образует датчик угла.
Кроме того, датчик угла снабжается специальной системой наведения, с помощью которой наводчик может изменять направление оси канала ствола.
Стабилизатор вооружения танка работает в такой последовательности. Наводчик, обнаружив цель, воздействует с помощью системы наведения на гироскопический задатчик и задает нужное направление стабилизируемой оси гироскопа φзад, которому должно соответствовать направление оси канала ствола стабилизированного орудия, после чего наводчик прекращает наведение (прекращает воздействие на систему наведения) и принимает решение о производстве выстрела.
Под действием возмущающего момента Мв, передаваемого на орудие при колебаниях корпуса танка, ось канала ствола будет отклоняться от заданного направления. Возникшее угловое рассогласование (Δφ) между заданным направлением оси канала ствола орудия φзад и его действительным направлением φ0 измеряется электрическим датчиком. При этом угловое рассогласование преобразуется в управляющий электрический сигнал. Этот сигнал усиливается в усилителе до величины, которая необходима для управления исполнительным приводом стабилизатора орудия.
Исполнительный привод создает стабилизирующий момент Мс, под действием которого орудие поворачивается в сторону, противоположную направлению поворота корпуса танка. Благодаря этому возникшее угловое рассогласование уменьшается, а направление оси канала ствола орудия сохраняется неизменным с определенной точностью.
Таким образом, во время движения танка, после того как наводчик прекратит наведение, орудие будет воспринимать воздействие внешних возмущающих моментов Мв, которые будут вызывать отклонения орудия от заданного направления. Одновременно орудие будет находиться под воздействием стабилизатора, который будет непрерывно приводить орудие в соответствие с заданным направлением.
Недостаток стабилизатора орудия, выполненного по схеме (рис. 73), состоит в том, что орудие после воздействия возмущающего момента Мв будет колебаться около заданного направления с чрезмерно большой амплитудой в течение продолжительного времени. Этот недостаток простейших стабилизаторов исключает возможность применения их в танках.
Однако качество простейшего стабилизатора вооружения может быть значительно улучшено, если уменьшить амплитуды колебаний орудия относительно заданного направления. Одновременно сократится и время регулирования, т. е. то время, в течение которого колебания орудия затухают до допустимой величины.
Уменьшение амплитуд колебаний орудия может быть достигнуто путем изменения формы управляющего сигнала (вида кривой управляющего сигнала), выдаваемого датчиком угла.
Для этой цели в первый момент возникновения рассогласования сразу после воздействия возмущающего момента необходимо резко увеличить управляющий сигнал, чтобы исполнительный привод стабилизатора энергично препятствовал начавшемуся отклонению орудия. При подходе же орудия к заданному направлению необходимо изменить знак управляющего сигнала, для того чтобы изменить направление воздействия исполнительного привода стабилизатора на обратное и притормозить орудие, не допуская его заметного перехода через заданное направление.
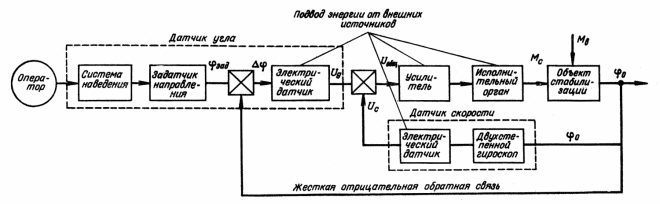
Изменить форму управляющего сигнала можно, если ввести в систему стабилизатора вооружения дополнительный сигнал определенной величины, пропорциональный скорости отклонения орудия. Этот сигнал нужно просуммировать с сигналом датчика угла, и тогда можно получить управляющий сигнал необходимой формы и величины.
Благодаря наличию сигнала, пропорционального скорости, орудие будет отклоняться от заданного направления на значительно меньшую величину, а при подходе к нему будет притормаживаться; совершив два-три колебания с небольшой амплитудой, орудие займет правильное направление за короткий промежуток времени.
Полная функциональная схема стабилизатора орудия с датчиком скорости показана на рис. 74. Основным отличием этой схемы от схемы, рассмотренной выше (рис. 73), является наличие датчика скорости.
Благодаря тому что сигнал, выдаваемый датчиком скорости, пропорционален скорости отклонения орудия от заданного направления, его введение в систему стабилизатора орудия является введением гибкой обратной связи. Как известно, при гибкой обратной связи в системе автоматического регулирования быстрее срабатывает система и уменьшается количество колебаний орудия после того, как наводчик, закончив наведение, возвратит рукоятки управления в нейтральное положение, или же после воздействия возмущающего момента, передаваемого на орудие при колебаниях корпуса танка.
Наряду со стабилизаторами вооружения, имеющими датчик угла и датчик скорости, выпускаются стабилизаторы, которые имеют только датчик скорости, как, например, на английском танке «Чифтен», где стабилизатор вооружения обеспечивает стабилизацию орудия в двух плоскостях и состоит из стабилизатора башни и стабилизатора орудия. Оба стабилизатора индикаторного типа.
Особенностью стабилизатора танка «Чифтен» является наличие контрольных приборов, постоянно включенных в схему, с помощью которых можно проверить стабилизатор и отыскать повреждение. Функциональная схема этого стабилизатора приведена на рис. 75.
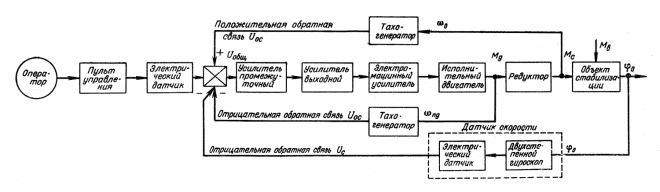
В режиме стабилизации основной сигнал выдает датчик скорости, который реагирует на абсолютную скорость движения орудия.
Исполнительный привод стабилизатора выполнен на электрических машинах. Исполнительный двигатель развивает вращающий момент Мд и через редуктор воздействует на объект стабилизации (башню с орудием), чем компенсирует действие внешнего возмущающего момента Мв.
Вследствие того что в стабилизаторе нет датчика угла, а имеется только датчик скорости, после остановки башни орудие не будет возвращено в первоначальное положение, а останется в новом положении. Но так как воздействия внешнего момента Мв имеют знакопеременный характер, то башня вместе с орудием будет удерживаться около заданного направления с некоторой точностью. Однако при воздействии на башню внешнего момента, имеющего постоянное направление, башня будет поворачиваться в направлении действия внешнего момента. Возникшее при этом отклонение орудия от заданного направления может быть устранено только оператором (наводчиком или командиром танка).
Быстродействие стабилизатора башни обеспечивается введением дополнительной отрицательной обратной связи по скорости вращения исполнительного двигателя, которая осуществляется с помощью специального тахогенератора, соединенного с исполнительным двигателем.
Для устранения автоколебаний, которые могут возникнуть в системе вследствие наличия люфтов и упругих элементов в редукторе (механизме поворота башни), введена положительная обратная связь по скорости вращения башни относительно корпуса танка. Эта обратная связь вводится тахогенератором, ротор которого связан с зубчатым венцом погона башни.
Для обеспечения безопасности членов экипажа и для предотвращения поломок стабилизатора при его применении стабилизаторы должны снабжаться специальными предохранительными устройствами — блокировками.
Рассмотрим в качестве примера блокировку, исключающую заброс орудия после выстрела и обеспечивающую стопорение орудия на период «откат — накат — заряжание».
При выстреле движущиеся назад откатные части орудия создают момент неуравновешенности, величина которого значительно превышает момент, развиваемый стабилизатором. Этот момент неуравновешенности вызывает принудительный поворот орудия в цапфах в сторону увеличения угла возвышения до его максимального значения (заброс орудия). Если стрельба производилась с небольшим углом возвышения орудия, то при забросе орудие повернется на большой угол, вследствие чего наводчик сразу после выстрела потеряет цель из поля зрения и не сможет проверить результаты стрельбы. Это явление может быть предотвращено путем стопорения орудия на время выстрела в положении, близком к заданному, что облегчает наводчику наблюдение за целью и результатами выстрела. Однако начавшаяся сразу после наката стабилизация орудия сильно затрудняет действия заряжающего, которому в это время нужно перезаряжать орудие. При движении танка его корпус, а вместе с ним заряжающий и остальные члены экипажа будут совершать колебания относительно стабилизированного орудия. Всем членам экипажа будет казаться, что колебания совершает орудие, казенная часть которого непрерывно перемещается то вверх, то вниз внутри боевого отделения. Перезарядить орудие в этих условиях очень трудно. Поэтому целесообразно увеличить время стопорения орудия на весь период заряжания. Для этого нужно, чтобы устройство, обеспечивающее стопорение орудия на период «откат—накат», выключалось не в конце наката движущихся частей орудия, а после заряжания орудия заряжающим вручную.
Наличие такого устройства резко облегчает условия перезаряжания орудия, так как при движении танка и колебаниях корпуса казенная часть орудия будет сохранять свое положение в боевом отделении неизменным.
Блокировки в современных стабилизаторах обеспечивают высокую надежность их работы и гарантируют безопасность работы экипажа.
§ 3. НАЗЕМНАЯ НАВИГАЦИОННАЯ АППАРАТУРА
Наземная навигационная аппаратура представляет собой одно из основных средств автоматизации управления войсками. При управлении войсками в бою, на марше и в разведке ориентируются с помощью военно-топографических карт, путем сравнения местных предметов и рельефа местности с их изображением на карте. Этот метод ориентирования может быть успешно применен в условиях хорошей видимости при наличии достаточного времени и при высокой топогеодезической подготовке офицеров. В ночное время или при плохой видимости ориентирование в лесах, горах или степной местности крайне затруднено, а в ряде случаев даже невозможно. Поэтому наличие навигационной аппаратуры на танке является совершенно необходимым хотя бы для определения местоположения машины.
Из всех возможных систем навигационной аппаратуры на танках могут быть использованы только те, в которых применяются гироскопические приборы, приборы, основанные на закономерности распространения радиоволн, и комбинированные.
Навигационная система, имеющая гироскопический указатель курса, является автономной, так как в ней исходные данные и последующая навигационная информация определяются непосредственно на борту подвижного объекта. Точность подобных систем достаточна для их практического применения на танках и бронеобъектах.
Радионавигационные системы, которые могут быть применены на танках и бронеобъектах иностранных армий в зависимости от метода определения координат движущегося объекта, разделяются на три группы: угломерные, дальномерные и разностно-дальномерные.
В радионавигационных угломерных системах координаты и направление движения подвижного объекта определяются путем измерения пеленга на два радиомаяка или более, установленные в пунктах с известными координатами.
Дальномерные радионавигационные системы основаны на использовании скорости распространения радиоволн. Местоположение подвижного объекта определяется точкой пересечения двух кривых, создаваемых двумя радиомаяками, координаты которых известны.
Разностно-дальномерные радионавигационные системы основаны на измерении разности расстояний от подвижного объекта до двух (или до двух пар) наземных радиостанций с известными координатами. Место подвижного объекта определяется по точкам пересечения линий, которые характеризуются постоянной разностью расстояний между двумя неподвижными радиостанциями и имеют вид сложных кривых гиперболического типа.
Радионавигационные системы применяются на практике. Так, разработана и испытана за рубежом радионавигационная система, которая создает над полем боя электромагнитную сетку, от которой любое количество потребителей может получать непрерывную навигационную информацию о своем местоположении. Радиус действия главной передающей станции 480 км. Точность ориентировки не более 100 м. Вес пехотной навигационной аппаратуры, переносимой в ранце, 9,5 кг.
В СССР был разработан комплект наземной навигационной аппаратуры «Янтарь-АМ-Трасса», который устанавливается на специальных бронемашинах, и несколько позже — навигационная аппаратура ТНА-2. С помощью комплекта наземной навигационной аппаратуры можно определять координаты положения подвижного объекта, водить отдельные машины и колонны по заданному маршруту или в заданный район, прокладывать колонные пути с нанесением маршрута движения на карту, наносить на карту новые дороги и решать задачи по топографической привязке боевых порядков.
Упрощенная функциональная схема наземной навигационной аппаратуры приведена на рис. 76.
Для определения текущих координат X и Y движущегося объекта непрерывно измеряются приращение пути ΔS и величина текущих значений дирекционных углов α. Приращение пути ΔS измеряется датчиком пути ДП, а величины дирекционных углов — датчиком дирекционного угла ДУ. Дирекционные углы преобразуются в тригонометрические функции sin α и cos α в синусно-косинусном построителе СКП. Тригонометрические функции дирекционного угла непрерывно умножаются в
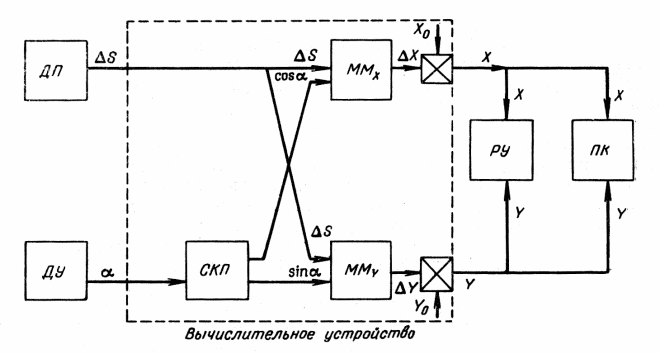
множительных механизмах ММХ и ММY на соответствующие приращения пути ΔS. Произведения ΔS cos α = ΔХ и ΔS sin α = ΔY представляют собой приращения координат движущегося объекта.
При работе аппаратуры на движущемся объекте непрерывно суммируются приращения координат ΔХ и ΔY с начальными координатами Х0 И Y0, которые характеризовали местоположение объекта перед началом движения.
Текущие координаты X и Y считываются со шкал регистрирующего устройства РУ, а карандаш построителя курса ПК наносит маршрут движения на топографическую карту. Одновременно специальные счетчики учитывают путь, пройденный объектом, и текущее значение дирекционного угла.
В качестве датчика угла применяется гирополукомпас, который перед началом движения необходимо развернуть в плоскость меридиана.
Основные характеристики отечественной наземной навигационной аппаратуры приведены в табл. 4.
Характеристики наземной навигационной аппаратуры
Целесообразность применения наземной навигационной аппаратуры; на танках и других бронеобъектах была подтверждена также рядом учений, проведенных за рубежом в последние годы.
В настоящее время за рубежом отработан ряд автономных навигационных систем, предназначенных для установки на бронеобъекты.
В этих системах для измерения пройденного пути применяется датчик пути с вводом корректуры пути. В качестве датчика дирекционного угла применяется гирокомпас, имеющий магнитную систему, которая обеспечивает автоматический выход оси гироскопа в плоскость меридиана за 30 мин.
В некоторых системах навигационной аппаратуры нашел применение магнитоиндукционный компас с двумя индукционными датчиками, более простой по конструкции, чем гирокомпас.
Комплект аппаратуры обычно состоит из датчика пути, гирокомпаса, счетно-решающего блока (вычислительного устройства), индикаторного блока (регистрирующего устройства), планшета с картой (построителя курса), указателя курса и источников питания. Корректура пути вводится вручную маховичком корректора пути.
В настоящее время аппаратура может использоваться на машинах, развивающих скорость до 110 км/ч. При этом ошибка в определении курса не превышает 1% на марше протяженностью 100 км.
В навигационной аппаратуре применяются планшеты двух типов:
— планшет с перемоткой топографической карты на роликах. При переходе с одного места карты на другое необходима новая установка светового указателя;
— проекционный планшет, в котором используется цветная фотопленка с карты масштаба 1:50000. Форма сигналов, подаваемых со счетно-решающего блока на проектор, обеспечивает возможность их передачи по радио.
Широкое внедрение автоматики в конструкцию современного танка значительно повысило его техническое совершенство.
Создание новых танковых автоматических систем при современном уровне состояния техники не представляет больших технических трудностей.
Повышение технического совершенства танка является только частью решения проблемы улучшения боевых качеств танка. Не менее важным являются обучение и подготовка личного состава танковых войск. Только подготовленный специалист, хорошо овладевший всеми автоматизированными системами, может обеспечить их эффективную работу и тем самым повысить эффективность боевого применения танка в целом.
| Введение |
| Первые танки |
| Довоенные танки |
| Вторая мировая |
| 1945. 2009 |
© 1999-2022, V.Chobitok