Виды беспилотных летательных аппаратов. Создание опытного образца


Романов, И. В. Виды беспилотных летательных аппаратов. Создание опытного образца / И. В. Романов, В. А. Крутелёв. — Текст : непосредственный // Юный ученый. — 2023. — № 3 (66). — С. 396-398. — URL: https://moluch.ru/young/archive/66/3538/ (дата обращения: 03.11.2023).
Данная работа посвящена вопросу создания беспилотных летательных аппаратов (далее по тексту БПЛА). В ней рассмотрены виды БПЛА и их применение, а также получен продукт в виде опытного образца.
Введение
Беспилотные летательные аппараты стали набирать популярность совсем недавно, несмотря на то что первый беспилотный летательный аппарат появился ещё в 1933 году. Толчком к появлению дистанционно управляемых машин стало открытие электричества и изобретение радио. В первую очередь общественность заинтересовало военное применение этого изобретения. Идея военного дрона дала толчок развитию гражданских БПЛА, которые сегодня используются не только для развлечений, но и в качестве помощников во многих сферах жизнедеятельности. За прошедшее время БПЛА стали более доступными и стали использоваться в доставке грузов в труднодоступные места, сельском хозяйство, аэрофотосъёмке и т. д. Сегодня БПЛА получили широкое распространение по всему миру.
Целью данной работы является изучение видов БПЛА и создание опытного образца.
Задачи :
- Узнать виды БПЛА и их преимущества
- Изучить особенности конструкции выбранного вида БПЛА
- Создать опытный образец БПЛА
- Подвести итоги
В работе применились следующие методы исследования: математический, статистический, экспериментальный, тестирование и анализ.
Актуальность работы : Все хотят смотреть качественные фильмы, есть вкусные овощи и фрукты по невысокой цене, пользоваться удобными электронными картами, с помощью которых легко построить маршрут или определить своё место положения. Всего этого можно добиться с помощью БПЛА.
Работа адресована обширной аудитории и может быть интересна кинооператорам, фермерам, военным, полиции, картографам, а также детям.
Виды БПЛА:
На сегодняшний день наиболее распространены следующие виды БПЛА:
Мультикоптеры. Представляют из себя платформу с 3-мя и более двигателями. Наибольшее применении получили в сельском хозяйстве, киноиндустрии, воздушном такси, доставке грузов, военной сфере и сфере игрушек.
— Простота в производстве
— Простота в управлении
— Возможность зависать в воздухе
— Лёгкий взлёт и посадка
— Небольшое время полёта
— Низкая высота полёта
Однороторные дроны или беспилотные вертолёты. БПЛА оснащённые большим несущим винтом и хвостовым винтом или 2-мя большими несущими винтами. Наибольшее применение получили в воздушном такси, доставке грузов, сфера игрушек, военной сфере.
— Возможность зависать в воздухе
— Лёгкий взлёт и посадка
— Низкая высота полёта
— Небольшое время полёта
Беспилотники самолётного типа . Используют крыло для создания подъёмной силы. Наибольшее применение получили в военной сфере, аэрофотосъёмке.
— Большое время полёта
— Большая высота полёта
— Сложная посадка и взлёт
Гибридные БПЛА. Сочетают в себе свойства мультикоптеров и беспилотников самолётного типа. Наибольшее применение получили военной сфере, аэрофотосъёмке.
— Лёгкий взлёт и посадка
— Большое время полёта
— Возможность зависать в воздухе
— Большая высота полёта
— Высокая скорость полёта
— Непростое управление
— Сложны в разработке
Практика:
В качестве продукта мною было выбрано создание БПЛА самолётного типа.
Существуют различные аэродинамические схемы самолётов : летающее крыло (обладает высокой манёвренностью и высокой грузоподъёмностью), бесхвостка (малый вес планера и меньшее сопротивление), утка (высокая устойчивость и хорошая грузоподъёмность), нормальная (относительная простота разработки планера и высокий разбег центровок) и другие;
Различные формы хвостового оперения: T-образная (отличное качество скольжения), V-образная (меньший вес и меньшее сопротивление), классическая (простота конструкции, хорошая устойчивость) и т. д.;
Формы крыла : прямоугольное (простота конструкции и высокая подъёмная сила), трапециевидное (высокая скорость и прочность), оживальное (высокая скорость), треугольное (хорошо на сверхзвуковых скоростях) и прочие;
Профили крыла : симметричный (хорошая стабильность), плосковыпуклый (высокая подъёмная сила), двояковыпуклый (высокая подъёмная сила и жёсткость крыла) и т. д.
Мною была выбрана нормальная аэродинамическая схема и нормальная форма хвостового оперения (см. рис.1), что позволило упростить создание беспилотника. Для достижения хорошей подъёмной силы и хорошей скорости было выбрано прямоугольное крыло (см. рис. 2), переходящее в трапециевидное со срезами на концах и плосковыпуклый профиль крыла (см. рис. 3.)


Для лучшей боковой устойчивости крыло было изогнуто (см. рис. 4).

На БПЛА установлен бесколлекторный двигатель surpass GooIRC, приёмник Flysky Fs-IA6b, литиевый аккумулятор, регулятор оборотов, 2 сервопривода. Возможна установка камеры и другой электроники.
Заключение:
Таким образом, проделанная автором работа позволяет сделать следующие выводы.
В наши дни БПЛА очень распространены в различных сферах деятельности. Они предназначены для выполнения разнообразных миссий. Например, получение фото, телевизионного, тепловизионного изображения. Можно найти профессиональные, а можно изготовить в домашних условиях. Для того, чтобы изготовить беспилотник самому, необходимо обладать определёнными знаниями.
- Универсальная интернет-энциклопедия Википедия
- В. В. Никитин Авиамоделирование для начинающих. Инновации // Учебно-методические пособия, 2017.
- Краснов Н. Ф Аэродинамика. Часть 1. Основы теории. Аэродинамика профиля и крыла (1976)
- https://dronomania.ru — онлайн журнал о дронах.
- В. А. Фролов Аэродинамические характеристики профиля и крыла : учебное пособие, 2007.
- Житомирський Г. И. Конструкция самолетов. М.: Машиностроение, 1992.
- http://rc-aviation.ru — авиамодельный форум.
Беспилотные летательные аппараты МЧС России: виды и классификация
Современные технологии в области обнаружения и развития пожаров на сегодняшний день развиваются очень стремительно. Новейшие разработки могут удивить не только своим внешним видом, к примеру в области тушения и ликвидации последствий стихийных бедствий на сегодняшний день применяют роботизированную технику.
В нашей статье мы расскажем Вам о еще одной принципиально новой технологии которая активно внедряется и используется в современном мире.
Методический план-конспект доступен по кнопке «Скачать»
Беспилотная авиация может найти широкое применение для решения специальных задач, когда использование пилотируемой авиации невозможно или экономически невыгодно:
- осмотр труднодоступных участков границы,
- наблюдение за различными участками суши и водной поверхности,
- определение последствий стихийных бедствий и катастроф,
- выявление очагов лесных пожаров, выполнение поисковых и других работ.
Применение БПЛА позволяет дистанционно, без участия человека и без подвергания его опасности, проводить мониторинг ситуации на достаточно больших территориях в труднодоступных районах при относительной дешевизне.
Типы
По принципу полета все БПЛА можно разделить на 5 групп (первые 4 группы относятся к аппаратам аэродинамического типа):
- с жестким крылом (БПЛА самолетного типа);
- с гибким крылом;
- с вращающимся крылом (БПЛА вертолетного типа);
- с машущим крылом;
- аэростатические.
Кроме БПЛА перечисленных пяти групп существуют также различные гибридные подклассы аппаратов, которые по их принципу полета трудно однозначно отнести к какой-либо из перечисленных групп. Особенно много таких БПЛА, которые совмещают качества аппаратов самолетного и вертолетного типов.
С жестким крылом (самолетного типа)
Этот тип аппаратов известен также как БПЛА с жестким крылом. Подъемная сила данных аппаратов создается аэродинамическим способом за счет напора воздуха, набегающего на неподвижное крыло. Аппараты такого типа, как правило, отличаются большой длительностью полета, большой максимальной высотой полета и высокой скоростью.
Существует большое разнообразие подтипов БПЛА самолетного типа, различающихся по форме крыла и фюзеляжа. Практически все схемы компоновки самолета и типы фюзеляжей, которые встречаются в пилотируемой авиации, применимы и в беспилотной.
С гибким крылом
Это дешевые и экономичные летательные аппараты аэродинамического типа, в которых в качестве несущего крыла используется не жесткая, а гибкая (мягкая) конструкция, выполненная из ткани, эластичного полимерного материала или упругого композитного материала, обладающего свойством обратимой деформации. В этом классе БПЛА можно выделить беспилотные моторизованные парапланы, дельтапланы и БПЛА с упруго деформируемым крылом.
Беспилотный моторизованный параплан – аппарат на основе управляемого парашюта-крыла, снабжённый мототележкой с воздушным винтом для автономного разбега и самостоятельного полёта. Крыло обычно имеет форму прямоугольника или эллипса. Крыло может быть мягким, иметь жесткий или надувной каркас. Недостатком беспилотных моторизованных парапланов является трудность управления ими, так как навигационные датчики не имеют жесткой связи с крылом. Ограничение на их применение оказывает также очевидная зависимость от погодных условий.
С вращающимся крылом (вертолетного типа)
Этот тип аппаратов известен также как БПЛА с вращающимся крылом. Часто их называют также – БПЛА с вертикальным взлетом и посадкой. Последнее не совсем корректно, так как в общем случае вертикальный взлет и посадку могут иметь и БПЛА с неподвижным.
Подъемная сила у аппаратов этого типа также создается аэродинамически, но не за счет крыльев, а за счет вращающихся лопастей несущего винта (винтов). Крылья либо отсутствуют вовсе, либо играют вспомогательную роль. Очевидными преимуществами БПЛА вертолетного типа являются способность зависания в точке и высокая маневренность, поэтому их часто используют в качестве воздушных роботов.
С машущим крылом
БПЛА с машущим крылом основаны на бионическом принципе – копировании движений, создаваемых в полете летающими живыми объектами – птицами и насекомыми. Хотя в этом классе БПЛА пока нет серийно выпускаемых аппаратов и практического применения они пока не имеют, во всем мире проводятся интенсивные исследования в этой области. В последние годы появилось большое количество разных интересных концептов малых БПЛА с машущим крылом.
Главные преимущества, которые имеют птицы и летающие насекомые перед существующими типами летательных аппаратов – это их энергоэффективность и маневренность. Аппараты, основанные на имитации движений птиц, получили название орнитоптеров, а аппараты, в которых копируются движения летающих насекомых – энтомоптерами.
Аэростатические
БПЛА аэростатического типа – это особый класс БПЛА, в котором подъемная сила создается преимущественно за счет архимедовой силы, действующей на баллон, заполненный легким газом (как правило, гелием). Этот класс представлен, в основном, беспилотными дирижаблями.
Дирижабль – летательный аппарат легче воздуха, представляющий собой комбинацию аэростата с движителем (обычно это винт (пропеллер, импеллер) с электрическим двигателем или ДВС) и системы управления ориентацией. По конструкции дирижабли подразделяются на три основных типа: мягкий, полужёсткий и жёсткий. В дирижаблях мягкого и полужёсткого типа оболочка для несущего газа мягкая, которая приобретает требуемую форму только после закачки в неё несущего газа под определённым давлением.
В дирижаблях мягкого типа неизменяемость внешней формы достигается избыточным давлением несущего газа, постоянно поддерживаемым баллонетами – мягкими ёмкостями, расположенными внутри оболочки, в которые нагнетается воздух. Баллонеты, кроме того, служат для регулирования подъемной силы и управления углом тангажа (дифференцированная откачка/закачка воздуха в баллонеты приводит к изменению центра тяжести аппарата).
Дирижабли полужёсткого типа отличаются наличием в нижней части оболочки жесткой (в большинстве случаев на всю длину оболочки) фермы. В жёстких дирижаблях неизменяемость внешней формы обеспечивается жестким каркасом, обтянутым тканью, а газ находится внутри жёсткого каркаса в баллонах из газонепроницаемой материи. Жесткие дирижабли в беспилотном исполнении пока практически не применяются.
Одноразовые для мониторинга лесных пожаров
Одноразовые БПЛА для мониторинга лесных пожаров
Когда нам говорят про беспилотные летательные аппараты, мы представляем себе скрытные и смертоносные самолеты, патрулирующие зону боевых действий. Однако два представленных БПЛА меняют свою область применения на более мирную.
Основное назначение представленных моделей – борьба с лесными пожарами, отслеживание пожарной обстановки на больших площадях, а также поиск людей.
Созданные доктором Полом Паундсем, из университета Квинсленда, Австралия, дроны спроектированы максимально дешевыми в изготовлении, что позволяет им стать одноразовыми.

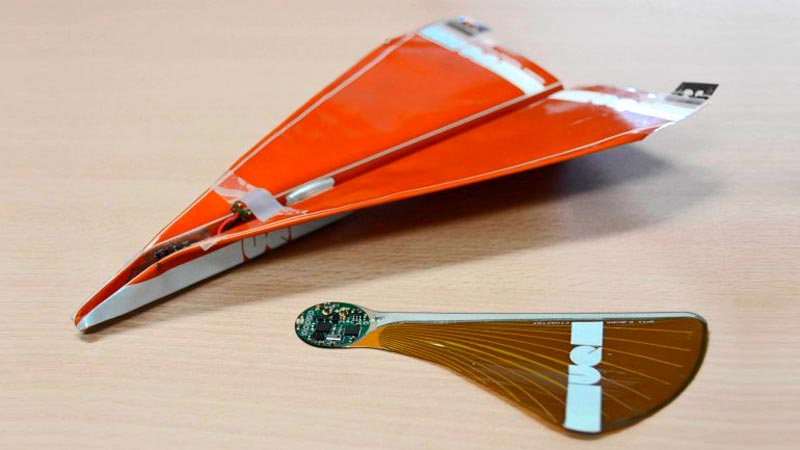
Концепт одноразового БПЛА в виде бумажного самолетика
Первый образец представляет собой подобие бумажного самолетика, изготовленный из целлюлозного материала, в которые впечатаны электронные компоненты. Планер не имеет двигателя, однако снабжен небольшими элеронами в хвостовой части, которые позволяют направлять его к цели.
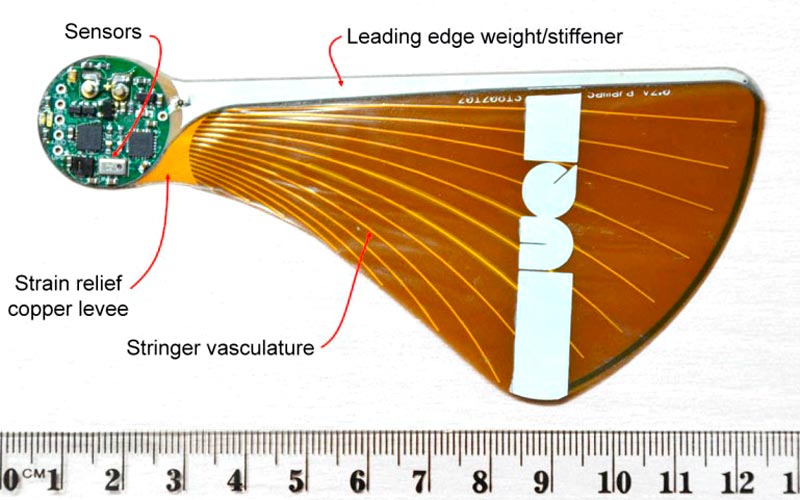
Концепт БПЛА «Samara»
Второй концепт из лаборатории доктора имеет кодовое имя «Samara». На первый взгляд, он выглядит довольно странно и напоминает кленовое семечко. В центре устройства размещена жесткая печатная плата, на которой размещены электронная начинка и сенсоры. К контейнеру с электроникой прикреплено «крыло» на жестком каркасе.
При использовании на местности, охапку одноразовых дронов выбрасывают с самолета над исследуемой местностью. Медленно и аккуратно, вращаясь, они опускаются на землю, попутно собирая с помощью сенсоров и передавая в центр управления необходимые данные.
Классификация
Некоторые классы зарубежной классификации отсутствуют в РФ, лёгкие БПЛА в России имеют значительно большую дальность и т.д. Согласно российской классификации, которая ориентирована преимущественно пока только на военное назначение аппаратов.
БПЛА можно систематизировать следующим образом:
- Микро– и мини–БПЛА ближнего радиуса действия – взлётная масса до 5 кг, дальность действия до 25-40 км;
- Лёгкие БПЛА малого радиуса действия – взлётная масса 5-50 кг, дальность действия 10-70 км;
- Лёгкие БПЛА среднего радиуса действия – взлётная масса 50-100 кг, дальность действия 70-150 (250) км;
- Средние БПЛА – взлётная масса 100-300 кг, дальность действия 150-1000 км;
- Средне-тяжёлые БПЛА – взлётная масса 300-500 кг, дальность действия 70-300 км;
- Тяжёлые БПЛА среднего радиуса действия – взлётная масса более 500 кг, дальность действия 70-300 км;
- Тяжёлые БПЛА большой продолжительности полёта – взлётная масса более 1500 кг, дальность действия около 1500 км;
- Беспилотные боевые самолёты – взлётная масса более 500 кг, дальностью около 1500 км.
Применяемые БПЛА
Гранад ВА-1000

Комплекс воздушной разведки Гранад ВА-1000
ZALA 421-16E
Для технического оснащения МЧС России беспилотными летательными аппаратами, российскими предприятиями разработано несколько вариантов, рассмотрим некоторые из них:
Это беспилотный самолет большой дальности (рис. 1.) с системой автоматического управления (автопилот), навигационной системой с инерциальной коррекцией (GPS/ГЛОНАСС), встроенной цифровой системой телеметрии, навигационными огнями, встроенным трехосевым магнитометром, модулем удержания и активного сопровождения цели («Модуль AC»), цифровым встроенным фотоаппаратом, цифровым широкополосным видеопередатчиком C-OFDM-модуляции, радиомодемом с приемником спутниковой навигационной системы (СНС) «Диагональ ВОЗДУХ» с возможностью работы без сигнала СНС (радиодальномер) системой самодиагностики, датчиком влажности, датчиком температуры, датчиком тока, датчиком температуры двигательной установки, отцепом парашюта, воздушным амортизатором для защиты целевой нагрузки при посадке и поисковым передатчиком.
Данный комплекс предназначен для ведения воздушного наблюдения в любое время суток на удалении до 50 км с передачей видеоизображения в режиме реального времени. Беспилотный самолет успешно решает задачи по обеспечению безопасности и контролю стратегически важных объектов, позволяет определять координаты цели и оперативно принимать решения по корректировке действий наземных служб. Благодаря встроенному «Модулю АС» БПЛА в автоматическом режиме ведет наблюдение за статичными и подвижными объектами. При отсутствии сигнала СНС – БПЛА автономно продолжит выполнение задания.

Рис. 1. БПЛА ZALA 421-16E
ZALA 421-08M
Выполнен по схеме «летающее крыло» – это беспилотный самолет тактической дальности с автопилотом, имеет подобный набор функций и модулей, что и ZALA 421-16E. Данный комплекс предназначен для оперативной разведки местности на удалении до 15 км с передачей видеоизображения в режиме реального времени. БПЛА ZALA 421-08M выгодно отличается сверхнадежностью, удобством эксплуатации, низкой акустической, визуальной заметностью и лучшими в своем классе целевыми нагрузками.
Данный летательный аппарат не требует специально подготовленной взлетно-посадочной площадки благодаря тому, что взлет совершается за счет эластичной катапульты, осуществляет воздушную разведку при различных метеоусловиях в любое время суток.
Транспортировка комплекса с БЛА ZALA 421-08M к месту эксплуатации может быть осуществлена одним человеком. Легкость аппарата позволяет (при соответствующей подготовке) производить запуск «с рук», без использования катапульты, что делает его незаменимым при решении задач. Встроенный «Модуль АС» позволяет беспилотному самолету в автоматическом режиме вести наблюдение за статичными и подвижными объектами, как на суше, так и на воде.
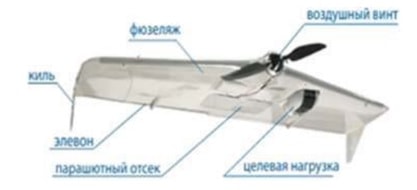
Рис. 2. БПЛА ZALA 421-08M
ZALA 421-22
Это беспилотный вертолет с восемью несущими винтами, средней дальности действия, со встроенной системой автопилота (рис. 3). Конструкция аппарата складная, выполнена из композитных материалов, что обеспечивает удобство доставки комплекса к месту эксплуатации любым транспортным средством.
Данный аппарат не требует специально подготовленной взлетно- посадочной площадки из-за вертикально-автоматического запуска и посадки, что делает его незаменимым при проведении воздушной разведки в труднодоступных районах.
Успешно применяется для выполнения операций в любое время суток: для поиска и обнаружения объектов, обеспечения безопасности периметров в радиусе до 5 км. Благодаря встроенному «Модулю АС» аппарат в автоматическом режиме ведет наблюдение за статичными и подвижными объектами.

Рис. 3. БПЛА ZALA 421-22
Phantom 3 Professional
Представляет собой следующее поколение квадрокоптеров DJI. Он способен записывать видео 4K и передавать видеосигнал высокой четкости прямо из коробки. Камера интегрирована в подвес, для максимальной стабильности и весовой эффективности при минимальном размере. При отсутствии GPS сигнала, технология Визуального позиционирования обеспечивает точность зависания.

Комплект Phantom 3 Professional
Функции Phantom 3 Professional
Камера и подвес: Phantom 3 Professional вы снимает 4K видео с частотой до 30 кадров в секунду и делает 12 мегапиксельные фотографии, которые выглядят четче и чище, чем когда-либо. Улучшенный сенсор камеры дает вам большую ясность, низкий уровень шума, и лучшие снимки, чем любая предыдущая летающая камера.
HD Видео Линк: Низкая задержка, HD передача видео, основана на системе DJI Lightbridge.
DJI Intelligent Flight Battery: 4480 mAh DJI Intelligent Flight Battery имеет новые элементы и использует интеллектуальную систему управления батареями.
Полетный контроллер: Полетный контроллер следующего поколения, обеспечивает более надежную работу. Новый самописец сохраняет данные каждого полета, а визуальное позиционирование позволяет при отсутствии GPS точно зависать в одной точке.
ТТХ Phantom 3 Professional
| БАС Фантом-3 | |
| Вес (с батареей и винтами) | 1280 г. |
| Максимальная скорость набора высоты | 5 м/с |
| Максимальная скорость снижения | 3 м/с |
| Максимальная скорость | 16 м/с (при режиме ATTI в безветренную погоду) |
| Максимальная высота полета | 6000 м |
| Максимальное время полета | Приблизительно 23 минуты |
| Рабочий диапазон температур | От – 10° до 40° С |
| Режим GPS | GPS/GLONASS |
| Подвес | |
| Охват | Угол наклона: от – 90° до + 30° |
| Визуальное позиционирование | |
| Диапазон скоростей | < 8 м/с (на высоте 2 метра над землей) |
| Диапазон высот | 30-300 см. |
| Рабочий диапазон | 30-300 см. |
| Рабочие условия | Ярко освещенные (> 15 люкс) поверхности с контурами |
| Камера | |
| Оптика | EXMOR 1/2.3” |
Угол обзора 94° 20 мм
(эквивалент формата 35 мм) f/2,8
Серийная съемка: 3/5/7 кадров
Автоматический экспобрекетинг (АЭБ)
брекетинг кадра 3/5 при вилке 0,7EV
Максимальная емкость 64 Гб. Требуемый класс скорости: 10 или UHS-1
FHD: 1920×1080p 24/25/30/48/50/60 fps
HD: 1280×720p 24/25/30/48/50/60 fps
Видео: MP4/MOV (MPEG-4 AVC/H.246)

Phantom 3 Professional
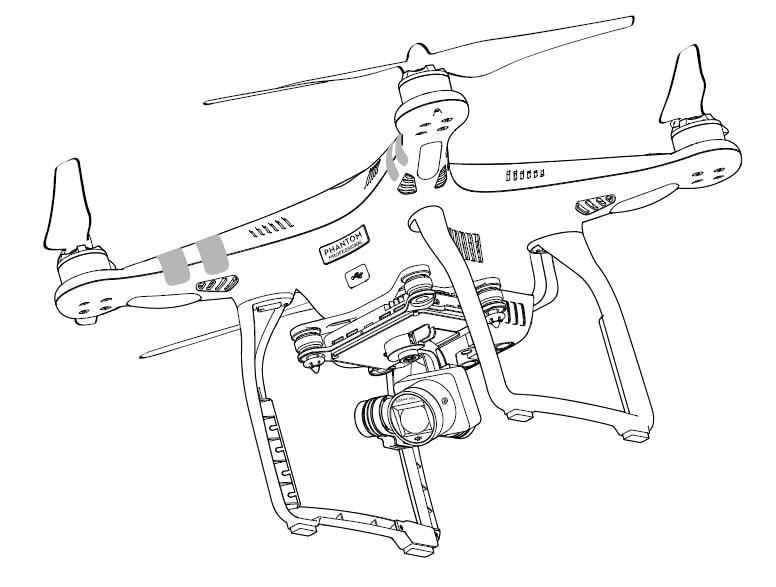
Рис. 4. БПЛА Phantom 3 Professional
Inspire 1
Inspire 1 является новым мультикоптером способным записывать 4K видео и передавать видеосигнал высокой четкости (до 2 км) к нескольким устройствам прямо из коробки. Оснащен убирающимся шасси, камера может беспрепятственно поворачиваться на 360 градусов. Камера интегрирована в подвес для максимальной стабильности и весовой эффективность при минимальном размере. При отсутствии GPS сигнала, технология Визуального позиционирования обеспечивает точность зависания.

Комплект Inspire 1
Функции Inspire 1
Камера и подвес: Запись видео до 4K и фотографии 12-мегапикселей. Присутствует место для установки нейтральных (ND) фильтров для лучшего контроля экспозиции. Новый механизм подвеса, позволяет быстро снять камеру.
HD Видео Линк: Низкая задержка, HD передача видео, это усовершенствованная версия системы DJI Lightbridge. Также существует возможность управление с двух пультов ДУ.
Шасси: Убирающиеся шасси, позволяют камере беспрепятственно делать панорамы.
Аккумулятор DJI Intelligent Flight Battery: 4500 мАч использует интеллектуальную систему управления батареями.
Полетный контроллер: Полетный контроллер следующего поколения, обеспечивает более надежную работу. Новый самописец сохраняет данные каждого полета, и визуальное позиционирование, позволяет при отсутствии GPS точно зависать в одной точке.
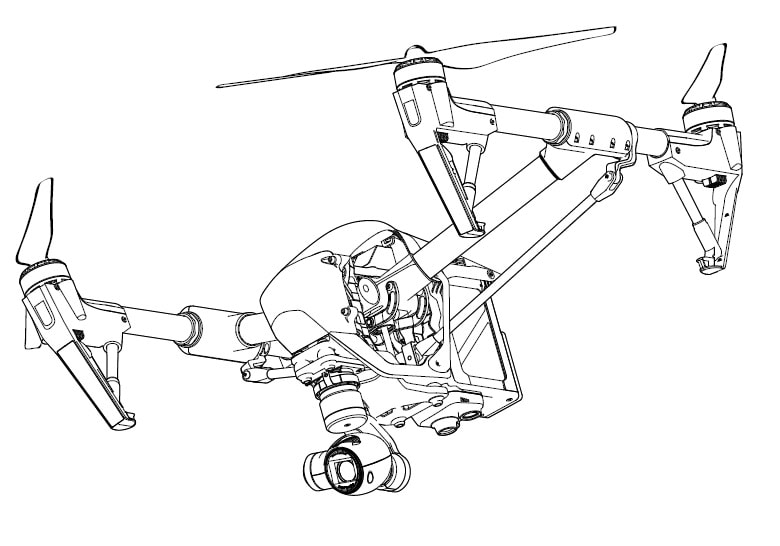
Рис. 5. БПЛА Inspire 1
Все характеристики перечисленных выше БПЛА представлены в таблице 1 (кроме Phantom 3 Professional и Inspire 1 так как указаны в тексте)
Обучение на операторов беспилотных летательных аппаратов
ТТХ Inspire 1
| БПЛА | ZALA 421-16E | ZALA 421-16ЕМ | ZALA 421-08М | ZALA 421-08Ф | ZALA 421-16 | ZALA 421-04М |
| Размах крыла БПЛА, мм | 2815 | 1810 | 810 | 425 | 1680 | 1615 |
| Продолжительность полета, ч(мин) | >4 | 2,5 | (80) | (80) | 4-8 | 1,5 |
| Длина БПЛА, мм | 1020 | 900 | 425 | – | – | 635 |
| Скорость, км/ч | 65-110 | 65-110 | 65-130 | 65-120 | 130-200 | 65-100 |
| Максимальная высота полета, м | 3600 | 3600 | 3600 | 3000 | 3000 | – |
| Масса целевой нагрузки, кг(г) | До 1,5 | До 1 | (300) | (300) | – | До 1 |
Преимущества
Можно выделить следующие:
- осуществляют полеты при различных погодных условиях, сложных помехах (порыв ветра, восходящий или нисходящий воздушный поток, попадание БПЛА в воздушную яму, при среднем и сильном тумане, сильном ливне);
- проводят воздушный мониторинг в труднодоступных и удаленных районах;
- являются безопасным источником достоверной информации, надежное обследование объекта или подозреваемой территории, с которой исходит угроза;
- позволяют предотвращать ЧС при регулярном наблюдении;
- обнаруживают ЧС (лесные пожары, горение торфяников) на ранних стадиях;
- исключают риск для жизни и здоровья человека.
Беспилотный летательный аппарат предназначен для решения следующих задач:
- беспилотный дистанционный мониторинг лесных массивов с целью обнаружения лесных пожаров;
- мониторинг и передача данных по радиоактивному и химическому заражению местности и воздушного пространства в заданном районе;
- инженерная разведка районов наводнений, землетрясений и других стихийных бедствий;
- обнаружение и мониторинг ледовых заторов и разлива рек;
- мониторинг состояния транспортных магистралей, нефте- и газопроводов, линий электропередач и других объектов;
- экологический мониторинг водных акваторий и береговой линии;
- определение точных координат районов ЧС и пострадавших объектов.
Мониторинг осуществляется днем и ночью, в благоприятных и ограниченных метеоусловиях. Наряду с этим беспилотный летательный аппарат обеспечивает поиск потерпевших аварию (катастрофу) технических средств и пропавших групп людей. Поиск проводится по заранее введенному полетному заданию или по оперативно изменяемому оператором маршруту полета. Он оснащен системами наведения, бортовыми радиолокационными комплексами, датчиками и видеокамерами.
Во время полета, как правило, управление беспилотным летательным аппаратом автоматически осуществляется посредством бортового комплекса навигации и управления, в состав которого входят:
- приемник спутниковой навигации, обеспечивающий прием навигационной информации от систем ГЛОНАСС и GPS;
- система инерциальных датчиков, обеспечивающая определение ориентации и параметров движения беспилотного летательного аппарата;
- система датчиков, обеспечивающая измерение высоты и воздушной скорости;
- различные виды антенн.
Бортовая система связи функционирует в разрешенном диапазоне радиочастот и обеспечивает передачу данных с борта на землю и с земли на борт.
Решаемые задачи
Можно классифицировать на четыре основные группы:
- обнаружение ЧС;
- участие в ликвидации ЧС;
- поиск и спасение пострадавших;
- оценка ущерба от ЧС.
В таких задачах старший оператор должен оптимальным образом выбрать маршрут, скорость и высоту полета ДПЛА, чтобы охватить район наблюдения за минимальное время или количество пролетов с учетом секторов обзора телевизионной и тепловизионной камер.
При этом необходимо исключать двукратный или многократный пролет одних и тех же мест с целью экономии материальных и людских ресурсов.
Дополнительный материал доступен по кнопке «Скачать» после статьи.
Самодельные летательные аппараты: как подняться в воздух на «стрекозе»
Многие в детстве смотрели на самолет в небе и мечтали стать летчиком. Некоторые даже брали мамин зонт, чтобы спрыгнуть с ним с крыши и полететь, и потом никак не могли понять, почему вместо полета два часа стояли в углу.
С годами большинство от мечты о небе отказалось. Но есть и другие. Инженер из подмосковного Королева планирует покорить небо на механической стрекозе, пенсионер из Тольятти собирает вертолет в гараже, а энтузиаст из американского Канзаса отправился к облакам на рое дронов.
Какие еще изобретения придумывают люди, чтобы воплотить детскую мечту? Об этом рассказывает программа «Наука и техника» с Михаилом Борзенковым на РЕН ТВ.
Параплан из дронов
Инженер из Тольятти Дмитрий Дмитриев всю жизнь хотел собрать крылатую машину своими руками, но время на это появилось только на пенсии. Начинающий авиаконструктор сам разработал чертежи и изготовил большинство деталей. Двигатель взял от отечественной малолитражки, а лопасти заказал в интернете. Наземную часть испытаний вертолет Дмитриева прошел успешно. А вот когда дело дошло до полетов, подняться в воздух не смог. Но неудача не остановила тольяттинского инженера. Он полон решимости доработать свою винтокрылую машину. Ведь подняться в воздух на самодельном летательном аппарате вполне реально.
Диковинный летательный аппарат создал инженер из Канзаса Питер Срипол. Ему понадобился старый рюкзак, алюминиевая рама и 50 дронов, с которых самоделкин, не раздумывая, скрутил двигатели. Миниатюрные моторы разработчик поместил в пластиковые турбины, которые сам напечатал на 3D-принтере, затем облепил ими остов будущего летательного аппарата. После этого оставалось только отцентровать конструкцию и превратить собственные руки в крылья, привязав к ним парашют.
«Сейчас я хочу проверить стропы и понять, как они будут вести себя во время полета. Надо все как следует настроить, чтобы они не оборвались, и меня не повело в сторону», – говорит создатель летательного аппарата с двигателями от дронов Питер Срипол.
Параплан с моторами оказался не только прост в управлении, но и довольно безопасен. Выход из строя одного из пяти десятков двигателей пилот даже заметил не сразу, ведь аппарат продолжал лететь как ни в чем не бывало.

Фото: © Скриншот видео
«Один из винтов сломался, и на всякий случай я решил совершить аварийную посадку. Сейчас все починим – просто заклеим его изолентой», – отметил Срипол.
Аппарат просто собирается, легко ремонтируется, и запчасти стоят недорого. Кажется, идеальное средство передвижения для доморощенного летчика. Вот только долго на нем не полетаешь. Пять десятков двигателей сажают аккумулятор всего за 15 минут. Можно было бы увеличить емкость батарей, но тогда и конструкция станет тяжелее. Следовательно, ей понадобится еще больше энергии – получается замкнутый круг.
Механическая стрекоза
Российские инженеры из подмосковного Королева придумали, как обойтись и без аккумулятора, и двигателя. Они создали гигантскую «стрекозу», которая летает исключительно на механике. Достаточно придать аппарату ускорение с помощью одной человеческой силы, и он начинает все активнее махать крыльями – так, что сам набирает сначала скорость, а потом и высоту.
«Это инженерная задача очень высокого уровня. Не ракета, конечно, но тем не менее очень много тонкостей: это и динамика, и прочность, и аэродинамика. Аэродинамика мало изучена, достоверных исследований не проведено. Поэтому работа с махолетом напоминает больше инженерную задачу, в которой каждый раз тыкаешь пальцем в небо и надеешься, что в этот раз попадешь. Ну, у нас получается попадать», – подчеркнул конструктор махолета Андрей Мельник.

Фото: © Скриншот видео
Во время полета экзотический махолет сам генерирует электричество и использует его для связи с пультом управления, ведь пилот пока находится на земле.
Изобретатели испытывают радиоуправляемую модель. В будущем на ее основе собираются собрать одноместный летательный аппарат. Для этого нужно будет всего лишь увеличить грузоподъемность механической стрекозы.
Гибрид коптера и самолета-беспилотника
В Швейцарии тоже решили вдохновиться природой и создали летающего спрута. Конструкторы гордо заявляют: это принципиально новый тип летательного аппарата – гибрид коптера и самолета-беспилотника. Винты позволяют ему вертикально взлетать и садиться, а ноги, они же крылья, делают аппарат по-настоящему многофункциональным. Они могут принимать любое положение, чтобы помогать технике лучше маневрировать, а могут превращаться в парус – это позволяет экономить энергию.
«Аппарат оснащен датчиками, которые при переменном ветре адаптируют крылья, чтобы обеспечить максимально эффективный полет. Каждое из крыльев работает автономно, так что этот летательный аппарат может виртуозно использовать ветер, а может отклонять ненужные потоки воздуха. Вдобавок, благодаря своей инновационной конструкции, наш беспилотник способен приземляться даже на неровных поверхностях», – рассказал соучредитель компании-разработчика летательного аппарата Натан Мюллер.

Фото: © Скриншот видео
В будущем разработчики собираются строить не маленькие дроны, а полноценные пассажирские самолеты-трансформеры. Правда, чтобы эти планы стали реальностью, должны пройти годы испытаний.
Мотодельтаплан
Два друга-инженера из Пензы превратили настоящую мечту авиаторов-любителей в реальность. Для этого им пришлось как следует переделать и без того легкий одноместный моторный планер АС-4. Он легко поднимается в воздух с человеком на борту, причем пилоту даже не нужно иметь лицензию на полеты. А все потому, что вес летательного аппарата всего 115 килограммов. С точки зрения авиационного законодательства, такой сверхлегкий самолет – все равно что велосипед на дороге. Чтобы летать на нем, достаточно пройти инструктаж.
«Я делал мотокороба, мотоустановку, топливную систему, бак. То есть у нас такая комбинация. Блок управления двигателем – тоже моя разработка (совместно с коллегами-электронщиками). Получилась такая штука легкая, ее можно вдвоем поднимать и детали перетаскивать. Крыло я сам таскаю», – поделился подробностями инженер-конструктор и летчик-испытатель планера Александр Кулишов.
Главное ноу-хау пензенских инженеров – идея установить на планер два реактивных двигателя. Для небольшого аппарата отлично подошли миниатюрные установки от авиамоделей. Но планер на них не летает, а взлетает. Дело в том, что обычно у таких аппаратов вообще нет мотора. Чтобы планер мог подняться в воздух, его берет на буксир самолет. Он помогает мотодельтоплану набрать скорость, которой будет достаточно для того, чтобы просто парить в небе. Пензенские инженеры смогли усовершенствовать эту схему. Они не только придумали, как заставить планер самостоятельно оторваться от земли, но еще и смогли заметно сократить размер взлетно-посадочной полосы.
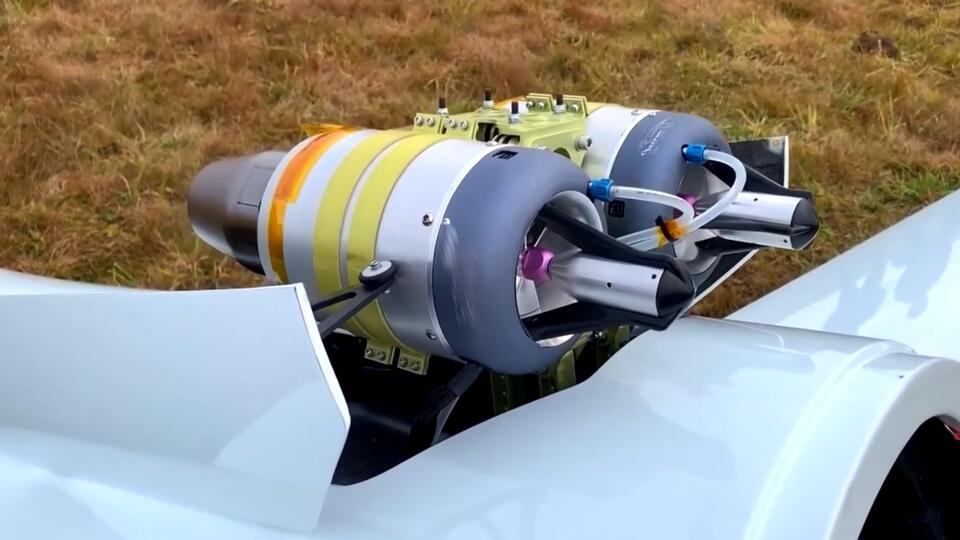
Фото: © Скриншот видео
Микрокоптер
Другому летательному аппарату полоса для разбега вообще не нужна. Он поднимается в воздух вертикально. Это самый маленький в мире вертолет, он же микрокоптер. Его придумал словенский конструктор Миро Крв, потому что с детства мечтал по воздуху добираться до своего дома в горах.
«Когда я был маленьким мальчиком, я очень хотел пролететь над долиной, где я живу. Сейчас мне 50 лет, и мои мечты сбываются», – говорит конструктор сверхлегкого вертолет микрокоптера Миро Крв.
На разработку конструкции летательного аппарата понадобилось 12 лет. Большая часть конструкции изготовлена из композитного алюминия, чтобы максимально облегчить вес.
«Уникальность этого вертолета – в соединении несущего винта и дроссельной заслонки на одном сферическом подшипнике. Трансмиссия здесь максимально простая, одноступенчатая. Но есть одна интересная особенность: мой микрокоптер соосный, то есть винты в нем располагаются друг над другом и крутятся в разные стороны. Это позволило сделать его намного компактнее, чем аппараты с хвостовыми винтами», – пояснил конструктор.

Фото: © Скриншот видео
Это кажется невероятным, но вертолет конструктора-любителя уже запустили в серийное производство. Разумеется, после всех положенных проверок.
Летающая тарелка
Британский инженер-испытатель Колин Ферз построил машину, которая позволяет почувствовать себя на орбите. Сложная система противовесов позволяет преодолеть силу тяготения и парить в невесомости.
«Я нажимаю на кнопку и становлюсь все легче и легче. Теперь я могу просто парить, а могу сделать стойку на руках или сальто. Словно нахожусь в космическом корабле», – говорит блогер, инженер-испытатель Колин Ферз.
Румынские конструкторы тоже мечтают о космосе, поэтому построили летающую тарелку. Футуристический аппарат предназначен для полетов на соседние планеты. А пока человечество не освоило Марс и Венеру, конструкторы предлагают использовать летающую тарелку на Земле.

Фото: © Скриншот видео
Первые испытания показали, что такая техника обладает необычайной маневренностью: она может легко разворачиваться на полной скорости и без проблем летает вверх ногами. Правда, пока это только радиоуправляемая модель, но инженеры рассчитывают превратить ее в пилотируемый корабль. Благодаря обтекаемой форме он легко сможет разгоняться до огромных скоростей и преодолевать сверхзвуковой барьер без привычного хлопка. Если все удастся, вполне возможно, что в будущем авиаконструкторы-любители начнут по всему миру строить не самолеты и вертолеты, а летающие тарелки.
О самых невероятных достижениях прогресса, открытиях ученых, инновациях, способных изменить будущее человечества, смотрите в программе «Наука и техника» с ведущим Михаилом Борзенковым на РЕН ТВ.
Летательные аппараты необычных схем и конструкций.

Со времен первых полетов человека на самолете, безудержная фантазия инженеров и отчаянный полет конструкторской мысли приводили к созданию необычных летательных аппаратов. Перед вами — обзор любопытных конструкций самолетов, вертолетов и спускаемых аппаратов, от летающих тарелок до «Каспийских монстров». Дорогие, экспериментальные и часто никогда не отрывавшиеся от земли… Вертолет Поля Корню. 1907 год. Франция Да, это вертолет. Причем один из первых совершивший управляемый взлет. Наверное, это пример того, что можно сделать со старой сноповязалки. В 1922 году в Дейтоне, родном городе братьев Райт, начались полеты геликоптера Г.Ботезата, бывшего профессора Петроградского технологического института. Ботезат обратился к многовинтовой схеме: дифференциальное раздельное управление тягой винтов сулило надежное управление поворотами в вертикальной плоскости или, попросту говоря, изменением положения носовой части вертолета относительно линии горизонта. Четыре шестилопастных винта изменяемого шага располагались на конце крестообразной фермы из стальных труб с растяжками из рояльных струн. Они вращались попарно в противоположных направлениях. Два небольших винта с горизонтальной тягой служили для путевого управления и поворотов в режиме висения. До весны 1923 года Г.Ботезат, пилоты Т.Бейн и А.Смит совершили несколько удачных полетов. В одном из них вертолет поднял на 4м полезный груз весом 450кг. Аэроджип Созданный в начале 1960-х VZ-8 Airgeep представлял собой платформу с двумя туннельными вентиляторами, которые приводились в движение парой 180-сильных двигателей. Вращающий момент передавался на винты с помощью единой трансмиссии, поэтому VZ-8 Airgeep мог оставаться в воздухе даже после отказа одного из двигателей. Для управления джипом использовался стандартный вертолетный интерфейс. Хотя аппарат был создан для полетов на высоте 1-2 м над землей, он был способен подниматься и на сотню метров, что позволяло ему легко преодолевать большинство препятствий. При этом платформа отличалась очень высокой устойчивостью и неплохой надежностью. Однако и этот проект был закрыт в 1962 г. – военные эксперты решили, что вместо летающих джипов удобнее использовать гораздо более универсальные и скоростные вертолеты.
В 1950-60-х гг. американские военные активно разрабатывали индивидуальные летающие аппараты, способные нести на себе одного или двух человек. Предполагалось, что с их помощью солдаты смогут с невиданной скоростью перемещаться по полю боя, вести разведку и охотиться на вражеских лазутчиков. В итоге было создано немало удачных конструкций, однако ни одну из них так и не приняли на вооружение. Летающая платформа De Lackner HZ-1 Аэроцикл подобного типа построила в конце 1950-х компания De Lackner. Аппарат HZ-1, был оснащен мотором мощностью в 40 л.с., а также двумя соосно расположенными винтами, которые вращались в противоположных направлениях, что позволило избежать вращения самой платформы. Пилот находился прямо над смертоносными лопастями, защищенный от падения лишь ремнями безопасности. Для управления аппаратом использовался руль наподобие мотоциклетного, с помощью которого можно изменять направление, скорость и высоту полета. Чтобы повернуться, необходимо было наклонить весь аппарат в нужную сторону – так же, как это делается на мотоцикле. При этом максимальная скорость движения составляла чуть более 100 км/ч. Очень похожий аппарат под названием VZ-1 Pawnee был разработан компанией Hiller Aviation в тех же 1950-х. Создатели его надеялись, что солдатам будет достаточно если не 20-минутного, то хотя бы двухчасового вводного курса, чтобы научиться летать. Винты аппарата, имевшие всего 3 м в диаметре, были укрыты внутри круглого корпуса – по сути, они являлись вентиляторами туннельного типа. Больше того, испытания показали, что VZ-1 Pawnee сам стремится принять вертикальное положение во время полета: накренившийся край платформы развивал большую подъемную силу, чем задранный край, в результате чего он выравнивался самостоятельно. Чтобы изменить направление движения, пилоту достаточно было слегка переместиться в нужном направлении, сдвинув общий центр масс. Таким образом, платформу было практически невозможно опрокинуть. Реактивный ранец. Реактивный ранец (или ракетный ранец; англ. jet pack, rocket pack, rocket belt и др.) — персональный летательный аппарат, носимый на спине, позволяющий человеку подниматься в воздух посредством реактивной тяги. Тяга создаётся за счёт выбрасываемой двигателем вертикально вниз реактивной струи. Различают два основных типа реактивных ранцев:
- ранец с ракетным двигателем (ракетный ранец, rocket pack или rocket belt).
- ранец с турбореактивным двигателем (собственно реактивный ранец, jet pack или jet belt);
Ракетные ранцы весьма просты по конструкции, поэтому именно они получили распространение. Классический ракетный ранец конструкции Венделла Мура может быть изготовлен в условиях частной мастерской, хотя для этого требуются хорошая инженерная подготовка и высокий уровень слесарного мастерства. Главный недостаток ракетного ранца — малая продолжительность полёта (до 30 секунд) и большой расход дефицитного топлива — перекиси водорода. Эти обстоятельства ограничивают сферу применения ракетных ранцев весьма эффектными публичными демонстрационными полётами. Полёты на ракетных ранцах всегда захватывают внимание зрителей и имеют большой успех. Например, такой полёт был устроен в ходе торжественного открытия летних Олимпийских игр 1984 года в Лос-Анджелесе, США.
Ранец имеет два рычага, жёстко связанных с двигательной установкой. Нажимая на эти рычаги, пилот заставляет сопла отклониться назад, и ранец летит вперёд. Соответственно, поднятие рычагов заставляет ранец двигаться назад. Можно наклонять двигательную установку и в стороны (благодаря шаровому шарниру), чтобы лететь боком.
Пилот ранца облачён в защитный комбинезон из термостойкого материала, поскольку и реактивная струя, и трубы двигателя имеют очень высокую температуру. На голову в обязательном порядке надевается защитный шлем.
Ранцы с турбореактивным двигателем работают на традиционном керосине, имеют более высокий КПД, бо́льшую высоту и продолжительность полёта, но они сложны по конструкции и очень дороги. Изготовить такой ранец в кустарных условиях невозможно.
Управление турбореактивным ранцем похоже на управление ракетного ранца, но пилот уже не может наклонять всю двигательную установку. Маневрирование выполняется только отклонением управляемых сопел. Наклоняя рычаги, пилот отклоняет реактивную струю обоих сопел вперёд, назад или в стороны. Поворотом левой рукоятки пилот поворачивает ранец. Правая рукоятка, как обычно, управляет тягой двигателя.
Запуск реактивного двигателя осуществляется с помощью порохового пиропатрона. На испытаниях для запуска использовали передвижной стартер на специальной тележке. Имеются приборы для контроля работы двигателя и рация для связи и передачи телеметрической информации наземным инженерам.
Сверху на ранце установлен парашют (используется стандартный десантный запасной парашют). Он эффективен только при открытии на высоте более 20 метров.
Был создан лишь один действующий образец такого ранца, он прошёл лётные испытания в 1960-х годах и в настоящее время уже не летает.
Летающая тарелка
VZ-9-AV Avrocar — летательный аппарат вертикального взлёта и посадки разработки канадской компании Avro Aircraft Ltd.
Разработкой и созданием «летающей тарелки» занимался английский конструктор Джон Фрост / John Frost, чьи идеи с использованием эффектом Коанда ( Coanda Effect) сначала привлекли внимание и финансирование канадской авиастроительной фирмы Avro Canada и позднее Военно-воздушных сил США. Всего было построено два аппарата Avrocar.
С 12 ноября 1959 года, после продолжительных испытаний «тарелки» в аэродинамической трубе NASA в Калифорнии, начались первые свободные полёты с летчиками-испытателями. В 1961 году финансирование проекта было прекращено в связи с невозможностью «тарелки» оторваться от земли выше 1,5 метров (по другим источникам 2, 5 м), проблем со стабильностью и турбо-ротором.
До сих пор существует версия, что на самом деле, проект оказался успешным, а вся информация о провале — это лишь отвлекающий маневр, за которым скрываются разработки секретных летательных аппаратов на основе чертежей немецких инженеров, доставшихся после поражения Третьего рейха войскам союзников.
Летающий блин
Экспериментальный самолет Vought V-173. В 1940-х годах американский инженер Чарльз Циммерман создал самолет уникальной аэродинамической схемы, который до сих пор продолжает удивлять не только своим необычным видом, но и летными характеристиками.
В течение несколько лет Циммерман проверял различные аэродинамические компоновки, пока не пришел к выводу о хороших характеристиках несущей поверхности, имеющей в плане круглую форму.
Исследования показали, что крыло дискообразной формы, несмотря на сравнительно большое сопротивление воздуха, имеет очень хорошую подъемную силу.
Основным агрегатом конструкции было крыло-корпус, близкое по форме к кругу. При этом профиль крыла был симметричным. Два воздушных винта самолета были вынесены вперед крыла и имели диаметр более пяти метров каждый. Благодаря этому, а также специально подобранной скорости вращения винтов, подъемная сила крыла была в несколько раз выше, чем у самолетов с прямым крылом такого же размаха. Кроме того, воздушные винты вращались так, что сходящие с лопастей вихри закручивались в сторону, обратную движению спутных вихрей на концах крыла.
В центре передней части крыла-корпуса была помещена кабина с каплеобразным фонарем. Для удобства летчика нижняя сторона передней части крыла была выполнена из стекла.
Испытания этого летательного аппарата производились вплоть до 1948 года. К тому времени в войска стали поступать реактивные истребители и «Летающему блину» попросту не нашлось места в номенклатуре флотской авиатехники. Революционная новизна конструкции оказалась тем фактором, который поставил крест на всем проекте. Из всех произведенных дискообразных летательных аппаратов Циммермана до сегодняшнего дня дожил только один из прототипов V-173, который хранится в Смитсонианском музее. В начале 1948 года программу заморозили, а немного позже оба прототипа были разобраны.
Бескрылый
Проект НАСА «М2-F1» получил прозвище «летающая ванна». Главное его предназначение разработчики видели в использовании в качестве капсулы для приземления астронавтов. Первый полет этого бескрылого летательного аппарата состоялся 16 августа 1963 года, а ровно через три года в тот же день, состоялся последний. Себестоимость одного экземпляра составила $30 000. Корпус этого аппарата был изготовлен из стали, красного дерева и алюминия. Причем, у «М2-F1» отсутствовал двигатель. А так как отсутствовали и крылья, то радиус возможного приземления аппарата, в качестве капсулы, был значительно больше площади Германии. Испытания проводились двух видов: подъем с земли (буксировка автомобилем) и полет (буксировка самолетом). Всего было осуществлено 77 полетов и 400 подъемов с земли. В будущем, этот проект стал важным исследованием для создания серии шаттлов.
Дистанционно управляемый
С середины 1979 г. до января 1983 г. на авиабазе НАСА проводились испытания двух дистанционно пилотируемых аппаратов HiMAT.
Эти модели с турбореактивными двигателями, управлялись через видеокамеры от первого лица. По-сути эти беспилотные исследовательские летательные аппараты были одними из первых авиамоделей FPV, то есть управляемые пилотом в реальном времени через видеосвязь.
HiMAT использовался для того, чтобы ускорить разработку передовых технологий и систем, используемых во многих современных высокотехнологичных, сверхманёвренных боевых самолетах.
Для исследований было построено два самолёта (длиной коло 6 метров), которые использовались в программе, которую проводило NASA совместно с лабораторией динамики полета ВВС США.
Данные авиамодели, которые поднимали в воздух в общей сложности 26 раз, позволили получить техническую информацию для использования в дальнейшем (на больших самолётах) композитных материалов, аэроупругого крыла, аэродинамической схемы «утка», крыла с винглетами, сложных компьютеризированных систем управления и многого другого.
Запускались они при помощи самолета спецтраспортника NASA B-52 с высоты 10-12 тысяч метров.
Ими управляли удаленно от наземной станции при помощи телекамеры, установленной в кабинах моделей. Аппараты отлично себя показали, на них удалось достичь сверхманёвренности, о которой так мечтали в те времена.
По окончании исследований оба аппарата были сохранены.
Бесхвостый
Прототип самолета McDonell Douglas X-36, построенный с одной целью: проверить летающие способности бесхвостых самолетов. Был построен в 1997 году и по задумке разработчиков мог управляться дистанционно с земли.
X-36 был построен в масштабе 28 % от возможного самолета-истребителя и управлялся пилотом с наземной станции. Наземная станция была построена по принципу виртуальной кабины пилота, в шлеме которого, отображалась картинка с установленной в носу самолета видеокамеры.
Поскольку X-36 был лишен вертикального стабилизатора, он был крайне нестабилен по курсу, что решалось специальной дистанционной цифровой автоматической системой стабилизации.
Первый реальный полет X-36 состоялся 17 Мая 1997 года. Всего был выполнен 31 успешный реальный полет (25 в течение шести месяцев 1997 года). По сообщениям результат достиг или превысил все цели проекта. X-36 обладал высокой маневренностью, которая могла быть идеальной для истребителя. Но, несмотря на потенциальную пригодность и очень успешную тестовую программу, нет никаких данных относительно дальнейшего развития проекта X-36.
Кособокий
Ames AD-1 (Эймес АД-1 ) — экспериментальный и первый в мире самолёт с косым крылом Ames Research Center и Бёрта Рутана. Был построен в 1979 году и совершил первый полет 29 декабря того же года. Длина машины составляла 11,83 метра, а размах крыла (в прямом положении) — 9,85 метра.
Его крыло могло занимать перпендикулярное положение (на взлёте) и поворачиваться на угол до 60 градусов – на скорости до 272 километров в час. Больше аппарат намеренно не разгоняли, по соображениям безопасности. Всё же — экспериментальная конструкция.
До 1982 года эта машина летала 79 раз. За это время AD-1 освоили 17 летчиков. Показав неплохие лётные качества, были выявлены и некоторые проблемы – с управляемостью в положении с диагональным крылом и с прочностью этого самого крыла.
После закрытия программы самолёт поместили в музей города Сан-Карлос, где он находится до сих пор.
С вращающимися крыльями.
Boeing Vertol VZ-2 — первый в мире летательный аппарат, использующий концепцию поворотного крыла, с вертикальным/укороченным взлетом и посадкой. Эти летательные аппараты называются конвертопланами. Их поворотные движителя (как, правило, винтовые), на взлёте и при посадке работают как подъёмные, а в горизонтальном полёте — как тянущие; при этом подъёмная сила обеспечивается крылом самолётного типа. Обычно, двигатели поворачиваются вместе с винтами, но могут поворачиваться только винты. Первый полет с вертикальным взлетом и зависанием в воздухе был совершен VZ-2 летом 1957 года. После серии успешных испытаний VZ-2 был передан в исследовательский центр NASA в начале 60-х.
Самый большой вертолет
В связи с потребностями советского народного хозяйства и вооруженных сил в конструкторском бюро им. М. Л. Миля в 1959 г. начались исследования сверхтяжелого вертолета. Проект вертолета-гиганта, получившего обозначение В-12, представлял собой четырехдвигательный вертолет, выполненный по двухвинтовой поперечной схеме. По краям каждой ферменной консоли-крыла были установлены гондолы, в которых находилось по 2 газотурбинных двигателя Д-25ВФ мощностью по 6500 л.с. каждый. Внутри крыла был расположен трансмиссионный вал, который синхронизировал обороты обоих винтов машины. Топливо размещалось в крыльевых и подвесных топливных баках.
6 августа 1969 года на вертолете МИ В-12 был установлен абсолютный мировой рекорд подъема груза — 40 тонн на высоту 2 250 метров, не превзойденный до настоящего времени; всего на вертолете В-12 было установлено 8 мировых рекордов.
Фюзеляж вертолета был изготовлен в виде огромного полумонокока. В передней части фюзеляжа располагалась кабина экипажа (2 этажа). В центральной части фюзеляжа располагался огромный грузовой отсек, обладающий следующими габаритами: 28,15×4,4×4,4 м.
В хвостовой части располагался силовой трап, оснащенный боковыми створками, при раскрытии данные створки образовывали проем, который предназначался для погрузки разнообразных грузов и въезда самоходной техники. Для облегчения процесса погрузки использовались тельферы и электролебедки.
Особенностью вертолета В-12 было хвостовое оперение, которое было реализовано по самолетному типу.
В 1971 году вертолет В-12 успешно демонстрировался на 29-м Международном авиакосмическом салоне в Париже, где был признан «звездой» салона, а затем в Копенгагене и Берлине. В-12 — самый тяжёлый и грузоподъёмный вертолёт, когда-либо построенный в мире.
Тяжелый вертолет В-12 успешно прошел все испытания, но в серийное производство запущен не был. Всего на данной винтокрылой машине было установлено 7 мировых рекордов, среди которых рекорд грузоподъемности для вертолетов (машине удалось поднять на высоту 2250 метров груз массой 40 тонн). Это выдающееся достижение было отмечено присуждением ОКБ Миля (второй раз в истории) международного приза имени Сикорского.
Самолет-космический корабль
Боинг X-48 (Boeing X-48) — американский экспериментальный беспилотный летательный аппарат, созданный совместными усилиями компании Boeing и агентства NASA.
Аппарат концерна Boeing сконструирован по схеме «смешанного крыла», в которой фюзеляж четко выражен и за счет плавных наплывов переходит в треугольные в плане крылья. В этом заключается отличие от схемы «летающего крыла», в котором фюзеляж редуцирован, а его роль играет само крыло, несущее все агрегаты, грузы и экипаж. Согласно подсчетам Boeing, схема «смешанного крыла» позволит создать самолет, простой в управлении, грузоподъемный и экономичный в плане потребления топлива.
Кроме того, благодаря применению схемы «смешанного крыла» Boeing рассчитывает создать экологичный за счет меньшего потребления топлива самолет с минимальным уровнем шумов. Для выполнения каких именно задач будет использоваться перспективный самолет, пока неизвестно. Согласно предположениям Boeing, он может заинтересовать военных в роли заправщика и транспортника.
20 июля 2007 он первые поднялся на высоту 2 300 метров и приземлился спустя 31 минуту полёта. X-48B стал лучшим изобретением 2007 года по версии Times.
Вертикально взлетающий
LTV XC-142 — американский экспериментальный транспортный самолет вертикального взлета и посадки с поворотным крылом. Самолёт LTV XC-142 представляет собой моноплан с высокорасположенным крылом, четырьмя ТВД и трехопорным шасси. В носовой части фюзеляжа расположена двухместная кабина экипажа с большой площадью остекления. Кабина оснащена стандартным оборудованием. Сиденья летчиков катапультные, разделяются необычно широкой консолью с приборами. Предусмотрено третье откидное сиденье для командира экипажа или командира десантной группы. Кабина оснащена двойным комплектом управления. Рычаги управления обычного типа; дополнительно установлен рычаг управления общим шагом винтов для управления вертикальными перемещениями самолета на режиме висения с кнопкой управления поворотом крыла. Управление самолётом LTV XC-142 в горизонтальном полете аналогично управлению обычным самолетом и осуществляется с помощью аэродинамических рулей.
Совершил первый полёт 29 сентября 1964 года. Построено пять самолетов. В ходе испытаний выявились значительные конструктивные недостатки прототипов. В частности, обнаружилась неудовлетворительная надёжность сложной трансмиссии. Помимо высоких вибрационных и шумовых нагрузок, значительно усложняющих работу пилота, выявилась проблема с изгибом конструкции крыла. Самолёт оказался неустойчивым на некоторых режимах, в частности — при угле поворота крыла между 35 и 80 градусами. Трудности с испытаниями, среди ряда других причин, вызвали падение интереса военных заказчиков к программе.Программа прекращена в 1970 году. Единственный сохранившийся экземпляр самолёта находится в экспозиции Музея ВВС США.
Каспийский Монстр
«КМ» (Корабль-макет), за рубежом также известен как «Каспийский монстр» — экспериментальный экраноплан, разработанный в конструкторском бюро Р. Е. Алексеева.
«Каспийский монстр» был построен в 1966 году и имел 10 турбовинтовых двигателей — восемь на крыльях и два на хвосте. Длина самолета составляла около ста метров, а вес — 540 тонн.
КМ, или корабль-макет, как его назвали в ЦКБ, имел длину 92 м, высоту 22 м, размах крыла 37 м. Днище корпуса было устроено по-корабельному, хотя внешне КМ походил на самолет. На переднем пилоне размещалось 8 турбореактивных двигателей тягой по 10 т каждый — их мощность использовалась в основном при старте. На киле стояли еще два таких же двигателя, достаточных для поддержания крейсерского режима. В рекордном полете его масса достигала 544 т, что было в то время неофициальным мировым рекордом для летательных аппаратов того времени.
Он был побит только с созданием самолета Ан-225 «Мрия».
Испытания «Каспийский монстр» проходили на Каспии в течении в течении 15 лет и закончились очень печально. 9 февраля 1980 года умер Алексеев. В тот же году погиб «Каспийский монстр». Пилот, давно не сидевший за штурвалом «монстра», слишком резко задрал при взлете нос машины, она быстро и почти вертикально пошла вверх, растерявшийся летчик резко сбросил тягу и не по инструкции сработал рулем высоты — корабль, завалившись на левое крыло, ударился о воду. Жертв не было. После чего операций по восстановлению или постройке нового экземпляра КМ не проводилось.
Воздушный кит
Super Guppy — транспортный самолет для перевозки негабаритных грузов. Разработчик — Aero Spacelines. Выпущен в количестве пяти экземпляров в двух модификациях. Первый полет — август 1965 года.
Первый самолет Super Guppy, или «SG», был построен с использованием фюзеляжа военно-транспортного самолета Boeing C-97 (военный вариант Boeing 377).
Фюзеляж был удлинен до 43 метров, а его диаметр увеличен до 7,6 м (максимальный внутренний диаметр); длина внутреннего грузового отсека составила 28,8 м. Фюзеляж сужался книзу, и ширина пола составила 2,7 м. Носовая секция фюзеляжа открывалась вбок для загрузки негабаритных грузов.
Всего было построено пять самолетов. Последний принадлежит NASA и эксплуатируется для доставки крупногабаритных изделий для МКС (базируется в аэропорту Ellington Field, Хьюстон, Техас). Четыре самолёта законсервированы и находятся в различных странах: США, Великобритания, Франция, Германия.
Компания Airbus ведет разработку и производство пяти новых грузовых лайнеров Airbus Beluga, предназначенных для перевозки негабаритных грузов. Следующее поколение транспортных лайнеров будет основано на базе планера Airbus A330-200 с сохранением многих существующих компонентов и оборудования от предыдущей модели Airbus A300-600 – объемного грузового отсека, откидывающейся кабины управления самолетом с дополнением новых модернизированных структур. Компания Airbus стремится создать новый лайнер, чтобы обеспечить потребности растущего производства корпорации в перевозке габаритных частей фюзеляжей собираемых моделей самолетов.
Благодаря очень большому транспортному отсеку с рабочим объёмом около 1400 м³ Beluga может транспортировать грузы с общим весом до 47 т. Транспортный отсек имеет 37,7 м в длину и 5,43 м в ширину. Диаметр фюзеляжа составляет 7,40 м. С такими размерами Beluga берет на борт пару крыльев Airbus A330 в сборе или большинство частей корпуса Airbus A319.
Винтокрыл
Знаменитый производитель вертолётов Сикорский ближе всего приблизился к тому, чтобы представить миру реальную версию звёздного истребителя «X-крыло» из «Звёздных войн». В середине 1970-ых годов Сикорский начал играть с экспериментальными дизайнами вертолётов, совмещая новые двигатели с последними разработками в аэродинамике. Самой впечатляющей моделью среди созданных новых вертолётов стал Исследовательский Летательный Аппарат S-72 с Винтокрылой Несущей Системой (S-72 Rotor Systems Research Aircraft).
Изначально на модели S-72 всего лишь тестировали возможности скомбинированного дизайна между самолётом и вертолётом, однако в 1980-ых годах государство обеспечило финансирование для установки винтокрылой несущей системы на S-72.
На первый взгляд Сикорский S-72 выглядел как нормальный вертолёт, не считая очень мощных лопастей несущего винта и реактивных двигателей, закреплённых по бокам корпуса. При взлёте винт крутился точно так же, как у обычного вертолёта, позволяя подняться в воздух вертикально. Винт был необычен тем, что не полагался на изменение наклона лопастей для выработки подъемной силы. Вместо этого в этом летательном аппарате использовалась сложная система сжатого воздуха, которая забирала воздух от двигателей и направляла его на концы лопастей винта, создавая дополнительную подъёмную силу.
В полёте лопасти винта надёжно блокируются и принимают на себя роль обычных крыльев самолёта. Когда Сикорский S-72 переходил к обычному полёту, он летел как самолёт, так как огромный винт давал достаточно подъёмной силы для его корпуса, а реактивные двигатели давали мощный толчок вперёд.
Первый полёт S-72 совершил 12 октября 1976. Полет модернизированного S-72 состоялся 2 декабря 1987 года. К сожалению, проект Сикорского очень быстро превысил бюджет. Государство вложило 100 миллионов долларов в проект ещё до того, как винтокрылая несущая система была прикреплена к корпусу.
Автожир
Автожир – это вид винтокрылых летательных аппаратов.. Название автожир чаще применяется в России. На западе более распространены названия гироплан, гирокоптер и ротаплан.
Автожир занимает промежуточное положение между самолетом и вертолетом. Для того, чтобы держаться в воздухе ему нужно движение вперед, но саму подъемную силу создает несущий винт, подобный вертолетному (только без двигателя ).
По расположению маршевого винта автожиры делятся на 2 типа: с тянущим винтом (исторически первые аппараты) и с толкающим винтом (наиболее распространённые в настоящее время). Преимущества схемы с тянущим винтом: лучшее охлаждение двигателя за счёт обдува винтом и несколько большая безопасность при аварии с ударом носовой частью (в схеме с толкающим винтом при такой аварии двигатель, расположенный за кабиной, может завалиться вперёд и травмировать пилота). В то же время, в схеме с толкающим винтом лучше обзор из кабины.
Аппарат с массой достоинств. Он значительно более легок в управлении, чем самолет или вертолет. Для него нет такого понятия, как штопор для самолета. При потере скорости он просто начинает снижаться, а если остановится двигатель, то совершит мягкую посадку. При этом для посадки автожиру не нужна большая площадка. Он может сесть с очень малым пробегом или даже практически без него. Для автожира с хорошей предварительной раскруткой ротора практически не нужна площадка и для взлета. Интересно, что при достаточно большом встречном ветре автожир может «висеть» в воздухе. Из всего сказанного можно сказать, что это один из самых безопасных летательных аппаратов. При этом стоимость его значительно ниже стоимости самолетов и вертолетов одного с ним класса
Современный автожир – это, в основном, одно- или двух местный аппарат, относящийся к категории сверхлегких. Обычно такого рода аппараты находятся в частном использовании, однако в настоящее время они начинают применяться в сельском хозяйстве (это показано в одном из приведенных роликов) и различных госструктурах, например в полиции, для осуществления патрулирования и осмотров местности
Пепелац
Roton ATV — это полномасштабный прототип, созданный для проверки летных характеристик космического корабля Roton в атмосфере, особенно во время посадки.
Корабль не имеет ракетных двигателей. Зато на нем установлен несущий винт как у вертолета и небольшие маневровые двигатели стабилизаторов. Прототип использовался для полетов на высоте порядка 1000 м.
После выхода аппарата в верхние слои атмосферы за счет вертикального вертолётного винта, вывод аппарата в космос должен был осуществляться с помощью реактивных сопел, расположенных на каждой лопасти. По идее создателей аппарата, Roton ATV должен был осуществлять постепенный выход из атмосферы на орбиту за счет вращения корпуса аппарата и нести полезную нагрузку 3,2 тонны. Масса самого корабля составляет 180 тонн, высота — 5,1 метров.
Суть хитрости состояла в том, что на макушке пирамидального аппарата размещался винт, типа вертолетного (на прототипе — именно от вертолета, для простоты), который приводился в действие (глубоко вздохнул) от кольцевой вращающейся системы из 72 жидкостных (керосин+кислород) двигателей, находящейся на традиционном для ракет месте — снизу.
Планируемое конструкторами конкурентное преимущество перед «самолетными» многоразовыми системами состояло в том, что никаких особых условий, как шаттлам, способным приземляться только на трех (если память не изменяет) аэродромах в мире — системе не требовалось — для посадки годилась любая ровная площадка, на котором помещался аппарат.
Разработчики все же успели провести испытательный полет, во время которого аппарат продемонстрировал возможности маневрирования в атмосфере. За несколько минут испытаний Roton ATV поднимался на высоту 23 метра и развивал скорость 86 километров в час. Также была продемонстрированы возможности зависания в воздухе и движения в вертикальном, и горизонтальном направлениях.
В 2001 году проект был закрыт из-за банкротства Rotary Rocket. Предполагалось же, что этот пепелац будет работать многоразовым одноступенчатым космическим аппаратом.
В настоящее время аппарат выставлен в качестве музейного эксоната в Классическом Музее Роторов — музее вертолетов около Сан-Диего в Калифорнии.
Jetlev.
Полностью рабочий прототип аналога ракетного ранца на водной тяге был завершен в 2008 году. По словам его создателей, первый набросок будущего аппарата появился за восемь лет до этого.
В воздух владельца Jetlev поднимают мощные водяные струи, создающие реактивную тягу. Насос и топливный бак располагаются внутри небольшой лодки, от которой к ранцу идёт 10-метровый шланг диаметром в добрый дециметр, если не больше.
Насос подаёт воду в сопла, размещённые за спиной пилота. Он управляет работой струй при помощи рукояток и может произвольно менять скорость, направление и высоту полёта, лететь, окуная ноги в воду, кратковременно нырять, выныривать обратно и зависать на одном месте.
Этот аппарат «привязан» к воде, однако это не умаляет его достоинств. Он приводится в движение 250-сильным мотором, размещающимся на поверхности практически любого водоема и использующим два мощных водомета для подъема управляющего им человека. Максимальная скорость полета актуальной модели составляет 40 км/ч. Высота подъема ограничивается длиной водонаборного шланга и составляет 8,5 метров.
100-литрового бака Jetlev хватает на 2-3 часа полётов в крейсерском режиме или на один час «полного газа». Максимальная скорость аппарата (с пилотом, весящим 68 кг).