Система активного рулевого управления
Система активного рулевого управления (Active Front Steering, AFS) предназначена для изменения передаточного отношения рулевого механизма в зависимости от скорости движения, а также корректирования угла поворота передних колес при прохождении поворотов и торможении на скользком покрытии.
Система AFS является совместной разработкой фирм Bosch и ZF. В настоящее время система устанавливается на большинство моделей автомобилей BMW в качестве опции и является фирменным атрибутом данной марки. Конкурентными преимуществами данной системы являются повышение комфорта и безопасности при эксплуатации автомобиля.
Система активного рулевого управления в своей работе взаимодействует с другими системами, в т.ч. с гидроусилителем руля Servotronic, системой динамической стабилизации DSC.
Конструкция системы AFS объединяет планетарный редуктор и систему управления.

Планетарный редуктор служит для изменения скорости вращения рулевого вала. Он устанавливается на рулевом валу. Планетарный редуктор включает солнечную шестерню, блок сателлитов и коронную (эпициклическую) шестерню. На входе рулевой вал соединен с солнечной шестерней, на выходе – с блоком сателлитов.
Эпициклическая шестерня имеет возможность вращения. При неподвижной шестерне передаточное число планетарного редуктора равно единице и рулевой вал передает вращение напрямую. Вращение эпициклической шестерни в одну или другую сторону позволяет увеличить или уменьшить передаточное число планетарной передачи, чем достигается изменение передаточного отношения рулевого механизма. Вращение шестерни обеспечивает электродвигатель, соединенный с ее внешней стороной посредством червячной передачи.
Для реализации функций системы активного рулевого управления создана система управления. Электронная система управления включает входные датчики, электронный блок управления и исполнительные устройства.
Входные датчики предназначены для измерения параметров работы системы и преобразования их в электрические сигналы. Система AFS в своей работе использует датчики положения электродвигателя, суммарного угла поворота, угла поворота рулевого колеса, датчики системы динамической стабилизации (скорости вращения автомобиля вокруг вертикальной оси и вертикального ускорения). Датчик суммарного угла поворота рулевого механизма может не устанавливаться, в этом случае угол рассчитывается виртуально на основании сигналов других датчиков.
Электронный блок управления принимает сигналы от датчиков, обрабатывает их и в соответствии с заложенным алгоритмом формирует управляющие воздействия на исполнительные устройства. Электронный блок управления имеет соединение и осуществляет взаимодействие с другими системами автомобиля: Servotronic, динамической стабилизации DSC, управления двигателем, доступа в автомобиль.
В роли исполнительного механизма системы AFS выступает электродвигатель. Он обеспечивает вращение эпициклической шестерни планетарного редуктора. Электродвигатель оборудован аварийным электромагнитным фиксатором, блокирующим червячную передачу. В исходном положении передача заблокирована. При подаче тока на электродвигатель, срабатывает электромагнит, и фиксатор, преодолевая усилие пружины, освобождает ротор электродвигателя. При возникновении неисправности в системе AFS, прекращается подача тока на электродвигатель, фиксатор блокирует червячную передачу.
Возникновение неисправностей в системе сопровождается срабатыванием сигнальной лампы на панели приборов. При этом на информационном дисплее появляется сообщение системы самодиагностики.
Принцип работы системы
Система активного рулевого управления активируется при запуске двигателя. Работа системы заключается в изменении передаточного отношения рулевого механизма в зависимости от скорости и условий движения.
При совершении маневров на низкой скорости в соответствии с сигналом датчика угла поворота рулевого колеса включается электродвигатель. Электродвигатель через червячную пару передает вращение на эпициклическую шестерню планетарного редуктора. Вращение шестерни в определенном направлении с максимальной скоростью обеспечивает наименьшее передаточное отношение рулевого механизма, которое достигает значения 1:10. При этом руль становиться острым, уменьшается число оборотов рулевого колеса от упора до упора, чем достигается высокий комфорт в управлении.
С ростом скорости движения выполнение поворотов сопровождается уменьшением частоты вращения электродвигателя, соответственно увеличивается передаточное отношение рулевого механизма. На скорости 180-200 км/ч передаточное отношение достигает оптимального значения 1:18. Электродвигатель при этом перестает вращаться, а усилие от рулевого колеса передается на рулевой механизм напрямую.
С дальнейшим ростом скорости электродвигатель снова включается, при этом вращение производится в противоположную сторону. Передаточное отношение рулевого механизма может достигать величины 1:20. При данном передаточном отношении рулевое управление обладает наименьшей остротой, увеличивается число оборотов рулевого колеса от упора до упора, тем самым обеспечивается безопасность маневрирования на высоких скоростях.
Если при прохождении поворота фиксируется избыточная поворачиваемость автомобиля (потеря сцепления задних колес с дорогой) система AFS на основании сигналов датчиков системы DSC самостоятельно корректирует угол поворота передних колес. В результате чего сохраняется курсовая устойчивость автомобиля. В случае, когда система активного рулевого управления не может полностью обеспечить устойчивость автомобиля, подключается система динамической стабилизации.
Аналогичным образом система активного рулевого управления стабилизирует движение автомобиля при торможении на скользком покрытии, чем достигается повышение эффективности антиблокировочной системы тормозов ABS и сокращение тормозного пути.
Система активного рулевого управления постоянно включена и не имеет возможности отключения.
S217A Активное рулевое управление (AFS): Теория и ремонт

Управляемость — одно из качеств, благодаря которым BMW покорило не одно сердце. Именно об этом и пойдет речь в данной записи.
Управляемость у BMW действительно хороша. И чтобы сделать ее еще лучше, BMW начало применять в своих автомобилях активное рулевое управление (AFS — Active Front Steering). Что же оно из себя представляет? Как оно работает? Какой эффект? Ответы на эти и другие вопросы представлены ниже.
Активное рулевое управление изменяет передаточное отношение рулевого механизма в зависимости от скорости. Тем самым обеспечивается более острое управление с малыми углами поворота рулевого колеса при низких скоростях и менее острое управление на больших скоростях с регулировкой скорости вращения автомобиля вокруг вертикальной оси. Сложновато для восприятия, но обо всем по-порядку.
Преимущества активного рулевого управление:
— более высокая маневренность;
— более высокая степень комфорта;
— большая безопасность.
Более высокая маневренность
При средних скоростях (около 100 км/ч) автомобиль благодаря большему передаточному отношению рулевого управления воспринимается еще более маневренным и управляемым. Водитель при маневрах намного лучше контролирует автомобиль в сочетании с заметно увеличившейся точностью рулевого управления и снижением усилий при управлении.
Более высокая степень комфорта
Для полного поворота колес из крайнего левого положения в крайнее правое сегодняшние модели BMW еще требуют более трех полных оборотов рулевого колеса. Активное рулевое управление уменьшает количество полных оборотов руля при низкой скорости движения до 2 и меньше. Преимущество: меньше усилий при вращении рулевого колеса для поворотов в городском потоке транспорта или при маневрировании в узких местах на стоянке. Кроме того, при движении с большим количеством поворотов, на извилистых дорогах, благодаря небольшому углу поворота рулевого колеса руки всегда остаются на рулевом колесе в оптимальном положении. Перехватывание или даже перекрещивание рук становится излишним. Многофункциональные клавиши на рулевом колесе в любой ситуации остаются оптимально досягаемыми.
Сравнение количества оборотов обычного рулевого управления и активного на BMW e60
При обычном рулевом управлении для поворота рулевого колеса из одного крайнего положения в другое необходимо сделать около 3,2 оборота, при активном — около 1,8 оборота. Почти в 2 раза, разница ощутимая.
Большая безопасность
Иная ситуация при высокой скорости: опосредованное передаточное отношение при высоких скоростях обеспечивает повышение устойчивости автомобиля при прямолинейном движении (например, на автомагистралях) по сравнению с обычным рулевым управлением. В то же время регулировка скорости вращения автомобиля вокруг вертикальной оси позволяет добиться устойчивости автомобиля при его избыточной поворачиваемости. Если автомобиль, например, при прохождении поворотов демонстрирует избыточную поворачиваемость, то регулировка скорости вращения автомобиля вокруг вертикальной оси может откорректировать угол поворота передних колес. Таким образом, активное рулевое управление в подобной дорожной ситуации поддерживает систему динамического контроля стабильности (DSC). Только если стабилизации за счет рулевого управления недостаточно, тогда вмешивается DSC.
Все вышесказанное хорошо представлено на следующем видеоролике
Активное рулевое управление начало устанавливаться на автомобили BMW 5-ой серии с модели е60. На ролике представлена е39, так как испытания данного управления проводились именно на этой модели.
Активное рулевое управление BMW, как и прежде, имеет рулевую колонку с постоянным соединением рулевого колеса и передних колес. Механическое соединение гарантирует постоянную работоспособность рулевого управления, даже в случае неисправности системы или ее полного выходя из строя. В то же время механическое соединение позволяет добиться настоящего «чувства руля», возникающего у водителя. По сравнению с этим системы с управлением только по проводам в принципе не могут создать настолько реалистичную обратную связь с водителем.
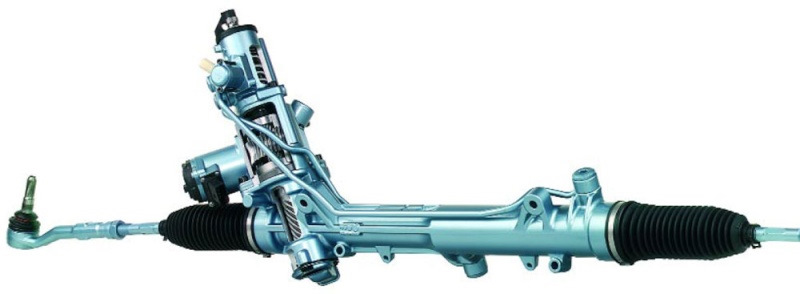
Устройство активной рулевой рейки

В разрез рулевого вала встроен планетарный механизм. Если электродвигатель не работает, то сателлиты соединяют вал и шестерню рулевого механизма напрямую. Если электродвигатель вращается, он через червяк поворачивает эпициклическую шестерню и в зависимости от направления работы или увеличивает, или уменьшает угловую скорость выходного вала. При отказе системы электромагнит аварийного фиксатора запирает червяк, блокируя механизм изменения передаточного отношения.

Все бы хорошо, но данное управление имеет и свои минусы. Один из них это стоимость как самой рейки, так и соответственно ее ремонта. Ввиду своего особого расположения в автомобиле, рулевые рейки в BMW имеют ограниченный срок эксплуатации. К пробегу 280 000 км моя рейка также не выделилась особой надежностью.
Еще при покупке автомобиля мною был обнаружен люфт руля. После полугодовой эксплуатации появился еще и стук. Необходимо было предпринимать какие-либо меры. Вариантов было 4:
— покупка новой рейки;
— покупка б/у рейки;
— ремонт своей рейки;
— переход на обычную рейку.
Много людей советовало поменять рейку на обычную, но мне этот путь не сильно нравился. Для начало надеялся отделаться малой кровью и узнать про ремонт своей рейки. Нашел в клубе людей, которые вроде неплохо ремонтируют рейки. Позиционируют они себя как профессионалы 80-го уровня. Обратился, по моим описаниям проблемы назвали сумму ремонта от 400$ за базовый ремонт рейки (замена ремкомплекта, замер зацепления в червячной паре, проверка рабочих параметров и компонентов системы активного рулевого управления, съем/установка рулевой рейки, комплектующие для ремонта (базовый оригинальный ремкомплект рулевой рейки: сальники, втулки, поршневые кольца, гидробарьерные кольца, маслостойкие резиновые уплотнения, пыльники рулевой рейки 2шт + оригинальные хомуты, оригинальное масло в систему), все необходимые токарные работы по валам, очистка деталей, сборка/разборка агрегата, проверка геометрии валов на стенде, регулировка червячного зацепления рулевой рейки на специализированном оборудовании, адаптация/настройка на специализированном оборудовании, процедура развал/схождения на лазерном стенде) до 1000$ в зависимости от наличия каких-либо серьезных неисправностей рулевого агрегата.
Считая, что ребята знают свою работу и не видя особых проблем по рейке (не считая мелкого люфта по рулю и стука самой рейки) решил, что обойдусь базовым ремонтом. Загнал к ним автомобиль. За полчаса оформления документов другой мастер успел добраться до вала рейки и продемонстрировать мне значительный его износ. Вал болтался туда-сюда как собачье ухо.
Вердикт один — вал под замену. Предложили 2 варианта: замена на б/у вал (ремонт встанет в 700$) и на новый от ZF (1000$). В случае замены на б/у вал и не достижения заводских допусков гарантию они бы не дали. Выбрал второй вариант.
Через 3 дня мой автомобиль был готов. По моей просьбе сделали несколько фотографий основных этапов ремонта






По итогу работы была выдана куча документов



UPD
После ремонта рейки прошло более года — замечаний нет.
Цена вопроса:
• Ремонт рейки под ключ — 1000$
Итого: 1000$
Теория
Если на управляемые колеса приходится большой вес, то управление затрудняется из-за необходимости прикладывать к рулевому колесу значительные усилия. Это предопределило применение усилителей рулевого управления.
Если первоначально по указанным причинам усилители применялись на тяжелых грузовых автомобилях и автобусах с высокими нагрузками на управляемые колеса, то в последние десятилетия усилители стали более широко применяться также и на легковых автомобилях, в том числе малого класса, поскольку позволяют использовать рулевые механизмы с меньшими передаточными числами и обеспечивать точность и быстродействие управления на высоких скоростях движения (меньше необходимые углы поворота рулевого колеса).
Возрастающие при этом усилия, необходимые для маневрирования с большими углами поворота колес (например, парковка), компенсируются действием усилителя. Кроме того, наличие усилителя снижает общую физическую нагрузку на водителя, в ряде случаев позволяет гасить удары от дорожных неровностей, усилитель обеспечивает возможность удержания автомобиля на дороге при повреждении шин или подвески. Но усилитель может оказать и отрицательное влияние на рулевое управление, например, из-за низкого быстродействия (запаздывание включения при резких поворотах руля), потери водителем «чувства дороги», снижении точности управления при слишком облегченном повороте рулевого колеса, колебаниях управляемых колес, спровоцированных усилителями.
Современные рулевые усилители имеют конструкцию, свободную от данных недостатков. Усилители, применяемые на современных автомобилях, по принципу своего действия могут быть адаптивными и неадаптивными, а по типу привода — гидравлическими, пневматическими и электрическими.
Адаптивные усилители могут изменять коэффициент усиления в зависимости от скорости автомобиля. У автомобиля с таким усилителем при маневрировании на стоянке усилие, необходимое для поворота рулевого колеса, значительно ниже, чем у неадаптивных, а по мере увеличения скорости движения автомобиля усилие поворота увеличивается.
Неадаптивный усилитель состоит из трех основных частей:
— силового элемента, создающего дополнительное усилие при работе рулевого управления;
— управляющего элемента, отвечающего за включение и выключение силового элемента.
Адаптивный усилитель руля, кроме перечисленных частей, имеет датчик скорости автомобиля, электронный блок управления и исполнительное устройство (обычно электрогидравлическое), которое воздействует на управляющий элемент.
Большинство современных автомобилей с усилителем имеют гидравлический усилитель рулевого управления, в котором гидравлический насос, приводимый от двигателя автомобиля (источник энергии), создает давление в гидравлическом цилиндре (силовой элемент). Наиболее распространены гидроусилители, в которых силовой и распределительный элементы объединены с рулевым механизмом в одном корпусе (гидроруль). Поршнем гидроцилиндра в реечном рулевом механизме при этом является рулевая рейка, в механизме «винт – гайка–рейка–сектор» — гайка. Управляющее устройство выполнено в виде золотника на входном вале механизма, который при прикладывании усилия к рулевому колесу поворачивается (или смещается) перекрывает определенные каналы для прохода жидкости и тем самым соединяет правую или левую полость гидроцилиндра с гидравлическим насосом.
На некоторых автомобилях (многоосные, тяжелые грузовые) гидроцилиндр устанавливают в непосредственной близости от управляемого колеса для снижения нагрузок на рулевой привод. Иногда с целью унификации конструкции рулевого механизма для автомобилей с усилителями и без них золотниковое распределительное устройство также располагается на тягах рулевого привода.
Разновидностью гидроусилителя является электрогидравлический усилитель, в котором гидравлический насос соединен с электродвигателем, питающимся от бортовой электросети автомобиля. Конструктивно электродвигатель и гидронасос (рис.5.1.5) объединены в силовой блок (Powerpack).

Рисунок 5.1.5 — Электрогидравлический рулевой усилитель
Преимущества такой схемы: компактность, возможность функционирования при неработающем двигателе (источник энергии — АКБ автомобиля); включение гидронасоса только в необходимые моменты (экономия энергии), возможность применения электронных схем регулирования в цепях электродвигателя.
В последние годы на легковых автомобилях стали применяться электрические усилители рулевого управления, в которых функции силового элемента выполняет электродвигатель, а управляющего элемента — электронный блок. Основные преимущества данного усилителя: удобство регулирования характеристик, повышение надежности (отсутствие гидравлики), экономное расходование энергии.
Возможны следующие варианты компоновки (рис.5.1.6) электрического усилителя:
— усилие электродвигателя передается на вал рулевого колеса;
— усилие электродвигателя передается на вал шестерни реечного рулевого механизма;
— электродвигатель воздействует через винтовую гайку на рейку рулевого механизма.
Электрический усилитель с воздействием на вал рулевого колеса может быть установлен без серьезных переделок на автомобили при условии, что прочность деталей рулевого управления окажется достаточной.
Пока электрические усилители применяются лишь на легких автомобилях, поскольку существующие бортовые источники электроэнергии не могут обеспечить работу электродвигателя высокой мощности. Но в случае перехода на более высокое напряжение бортовой сети (например, 48 В) можно ожидать расширения сферы применения электрических усилителей.

Рисунок 5.1.6 — Электрические усилители рулевого управления:
а — с воздействием на рулевой вал; б — с воздействием на шестерню рулевого механизма; в — с воздействием на рейку рулевого механизма
Электрический усилитель рулевого управления с двумя приводными шестернями
Основными компонентами рулевого управления являются (рис.5.1.7):
· подрулевые переключатели с датчиком угла поворота рулевого колеса,
· датчик крутящего момента на рулевом колесе,
· блок управления усилителем рулевого механизма.

Рисунок 5.1.7 – Общий вид электрического усилителя с двумя приводными шестернями
Рулевой механизм (рис.5.1.8) содержит датчик крутящего момента на рулевом колесе, торсион, приводные шестерни усилителя и вала рулевого управления, червячную передачу и электродвигатель с блоком управления. Основной деталью рулевого механизма с электрическим усилителем является рейка с зубьями на двух участках.

Рисунок 5.1.8 – Схема рулевого механизма
У рулевого механизма с электрическим усилителем и двумя приводными шестернями необходимое для поворота колес автомобиля усилие суммируется из усилий, передаваемых на рейку обеими шестернями. При этом на одну шестерню передается крутящий момент, создаваемый водителем на рулевом колесе, а на другую – крутящий момент электродвигателя усилителя после преобразования его в червячной передаче.
Оснащенный блоком управления и датчиком электродвигатель усилителя связан с отдельной шестерней рулевого механизма, в то время как другая шестерня обеспечивает механическую связь рулевого колеса с рейкой. Благодаря этому рулевое управление полностью сохраняет работоспособность при выходе из строя электродвигателя усилителя.
Работа усилителя происходит следующим образом:
1.Действие усилителя при повороте рулевого колеса (рис.5.1.9)

Рисунок 5.1.9 – Действие усилителя при повороте рулевого колеса
1. Усилитель рулевого механизма начинает действовать при повороте рулевого колеса водителем.
2. Действующий на рулевое колесо крутящий момент передается на рулевой механизм через торсион, который закручивается в соответствии с величиной момента. Закрутка торсиона измеряется посредством датчика крутящего момента, сигнал с которого поступает в блок управления усилителем.
3. Текущий угол поворота рулевого колеса измеряется датчиком угла поворота рулевого колеса, а скорость его вращения определяется по частоте вращения ротора двигателя усилителя, измеряемой посредством установленного на этом двигателе датчика.
4. Блок управления усилителем рассчитывает крутящий момент двигателя усилителя по величинам момента на рулевом колесе, скорости автомобиля, частоты вращения коленчатого вала, угла и скорости поворота рулевого колеса. При этом учитываются сохраняемые в памяти прибора характеристики. По результатам расчета блок управления изменяет крутящий момент двигателя усилителя.
5. Создаваемый электродвигателем усилителя крутящий момент передается через червячную передачу на приводную шестерню, которая действует на рейку рулевого механизма параллельно шестерне, приводимой от рулевого колеса.
6. Таким образом, перемещение рейки происходит под действием суммы усилий, создаваемых в результате преобразования крутящего момента двигателя усилителя и крутящего момента, передаваемого с рулевого колеса.
2.Действие усилителя при парковании (рис.5.1.10)

Рисунок 5.1.10 – Действие усилителя при парковании
1. При парковании водитель вынужден поворачивать рулевое колесо на относительно большие углы.
2. Закрутка торсиона измеряется датчиком крутящего момента. Передаваемые в блок управления сигналы датчика свидетельствуют при этом об относительно больших крутящих моментах на рулевом колесе.
3. Угол поворота рулевого колеса измеряется датчиком, а скорость его вращения определяется по частоте вращения ротора двигателя усилителя.
4. Ввиду относительно большого момента на рулевом колесе и нулевой скорости автомобиля блок управления определяет необходимость в значительном усилении рулевого управления, учитывая при этом частоту вращения коленчатого вала, угол и скорость поворота рулевого колеса, а также сохраняемую в памяти прибора характеристику усилителя для скорости автомобиля v=0 км/ч.
Соответственно этим расчетам устанавливается величина крутящего момента двигателя усилителя.
5. Таким образом, при парковании на рейку действуют максимальные усилия, передаваемые через вторую, параллельно действующую шестерню.
6. Перемещение рейки происходит под действием суммы усилий, создаваемых в результате преобразования крутящего момента двигателя усилителя и крутящего момента, передаваемого с рулевого колеса.
3.Действие усилителя при движении автомобиля в городе (рис.5.1.11)

Рисунок 5.1.11 – Действие усилителя при движении автомобиля в городе
1. При движении в городе водителю часто приходиться вращать рулевое колесо, совершая повороты.
2. Действующий на рулевое колесо крутящий момент передается на рулевой механизм через торсион, закрутка которого в данном случае не превышает средних значений.
Измеряющий закрутку торсиона датчик передает соответствующий ей сигнал в блок управления усилителем.
3. Текущий угол поворота рулевого колеса измеряется датчиком, а скорость его вращения определяется по частоте вращения ротора двигателя усилителя, измеряемой посредством установленного на этом двигателе датчика.
4. Ввиду умеренных значений крутящего момента на рулевом колесе и близкой к 50 км/ч скорости автомобиля блок управления определяет необходимость в относительно небольшом усилении рулевого управления.
При этом учитывается частота вращения коленчатого вала, угол и скорость поворота рулевого колеса, а также сохраняемая в памяти прибора характеристика усилителя для скорости автомобиля v=50 км/ч.
Соответственно этому устанавливается крутящий момент двигателя усилителя.
5. Таким образом, при движении на поворотах на рейку действуют умеренные усилия, передаваемые через вторую, параллельно действующую шестерню.
6. Перемещение рейки происходит в данном случае под действием суммы усилий, создаваемых в результате преобразования крутящего момента двигателя усилителя и крутящего момента, передаваемого с рулевого колеса.
4.Действие усилителя при движении на автомагистрали (рис.5.1.12)

Рисунок 5.1.12 – Действие усилителя при движении на автомагистрали
1. При смене полосы движения водитель поворачивает рулевое колесо на относительно небольшой угол.
2. Действующий на рулевое колесо крутящий момент передается на рулевой механизм через торсион, закрутка которого в данном случае невелика. Измеряющий закрутку торсиона датчик передает соответствующий ей сигнал в блок управления усилителем.
3. Текущий угол поворота рулевого колеса измеряется датчиком, а скорость его вращения определяется по частоте вращения ротора двигателя усилителя, измеряемой посредством установленного на этом двигателе датчика.
4. Ввиду малых значений крутящего момента на рулевом колесе и близкой к 100 км/ч скорости автомобиля блок управления определяет необходимость в очень небольшом усилении рулевого управления. При этом учитывается частота вращения коленчатого вала, угол и скорость поворота рулевого колеса, а также сохраняемая в памяти прибора характеристика усилителя для скорости автомобиля v=100 км/ч. Соответственно этому устанавливается крутящий момент двигателя усилителя.
5. Таким образом, при движении на автомагистрали на рейку действуют небольшие или близкие к нулю усилия, передаваемые через вторую, параллельно действующую шестерню.
6. Перемещение рейки происходит в данном случае под действием суммы усилий, создаваемых в результате преобразования крутящего момента двигателя усилителя и крутящего момента, передаваемого с рулевого колеса.
5.Активный возврат управляемых колес в среднее положение (рис.5.1.13)

Рисунок 5.1.13 – Активный возврат управляемых колес в среднее положение
1. Если при движении автомобиля на повороте водитель снижает усилия, прилагаемые к рулевому колесу, торсион раскручивается.
2. Блок управления рассчитывает скорость возврата колес автомобиля в среднее положение в зависимости от падающего момента на рулевом колесе, угла и скорости его поворота. Рассчитанное значение сравнивается с фактическим значением скорости возврата колес, а результат сравнения служит основанием для определения момента, необходимого для поворота колес в среднее положение.
3. Геометрия подвески обычно такова, что при повороте управляемых колес автомобиля возникают реактивные усилия, которые стремятся вернуть их в исходное среднее положение. Однако, эти усилия обычно настолько малы, что не могут преодолеть силы трения в рулевом приводе и в подвеске.
Поэтому самоустановка управляемых колес в среднее положение не происходит.
4. Блок управления усилителем рассчитывает необходимый для возврата колес крутящий момент двигателя усилителя по величинам момента на рулевом колесе, скорости автомобиля, частоты вращения коленчатого вала, угла и скорости поворота рулевого колеса.
При этом учитываются сохраняемые в памяти прибора характеристики. По результатам расчета блок управления изменяет крутящий момент двигателя усилителя.
5. В результате двигатель усилителя обеспечивает возврат управляемых колес в среднее положение.
6.Коррекция среднего положения управляемых колес
Коррекция среднего положения управляемых колес – это функция, которая реализуется благодаря способности рулевого управления к активной самоустановке. При этом усилитель создает крутящий момент, необходимый для удерживания колес автомобиля в положении, при котором автомобиль удерживается на прямолинейном курсе. Различают режимы кратковременной и долговременной коррекции среднего положения управляемых колес.
6.1.Режим долговременной коррекции
Усилитель работает в режиме долговременной коррекции, если необходимо постоянно устранять отклонение автомобиля от прямолинейного курса, например, после замены летних шин бывшими в употреблении зимними шинами.
6.2.Режим кратковременной стабилизации (рис.5.1.14)
При работе в этом режиме усилитель позволяет удерживать автомобиль на прямолинейном курсе при кратковременном воздействии на автомобиль внешних сил. Благодаря этому облегчается управление автомобилем, например, при действии на него бокового ветра.

Рисунок 5.1.14 – Режим кратковременной стабилизации
1. На автомобиль действует постоянная внешняя сила, вызываемая, например, боковым ветром.
2. Чтобы удержать автомобиль на прямолинейном курсе, водитель вынужден повернуть рулевое колесо из среднего положения.
3. Блок управления усилителем рассчитывает крутящий момент двигателя усилителя, необходимый для удержания автомобиля на прямолинейном курсе, по величинам момента на рулевом колесе, скорости автомобиля, частоты вращения коленчатого вала, угла и скорости поворота рулевого колеса. При этом учитываются сохраняемые в памяти прибора характеристики.
4. В результате двигатель усилителя помогает вернуть автомобиль на прямолинейный курс. При этом водитель не должен больше «подруливать».
На базе электрического усилителя был создан новый рулевой механизм с переменным передаточным отношением.
Благодаря специальной зубчатой рейке с разными зонами зубьев, при увеличении угла поворота рулевого колеса передаточное отношение рулевого механизма прогрессивно уменьшается. В результате характер рулевого управления становится ощутимо более непосредственным, а максимальные углы поворота рулевого колеса уменьшаются, делая управление автомобилем более удобным.
С технической точки зрения, главные отличия рулевого механизма с переменным передаточным отношением от обычного заключаются в зубчатой рейке с зубьями разной формы, вале-шестерне, а также более мощном электродвигателе. В отличие от рулевого механизма с постоянным передаточным отношением, в механизме с переменным передаточным отношением форма зубьев зубчатой рейки по мере удаления от положения прямолинейного движения существенно изменяется (рис.5.1.15).

Рисунок 5.1.15 – Конструкция рулевого механизма с переменным передаточным отношением
Благодаря большему или меньшему наклону зубьев, передаточное отношение при нахождении вала-шестерни в разных точках рейки оказывается разным. Другими словами, при том же повороте рулевого колеса такая рулевая рейка перемещается на большее расстояние.
В положении для прямолинейного движения вал-шестерня находится в зоне прямых зубьев (зелёная зона). При повороте рулевого колеса на угол больше определённого вал-шестерня находится на рейке в зоне косых зубьев (синяя зона).
Диапазон поворота рулевого колеса на автомобилях с обычным рулевым управлением, например, составляет 1080°. То есть водитель должен сделать 1,5 поворота рулевого колеса до правого или левого упора.
На автомобиле с рулевым управлением с переменным передаточным отношением общий диапазон поворота рулевого колеса составляет 720°. Водитель должен, таким образом, повернуть рулевое колесо только на один оборот (360°), чтобы дойти до правого или левого упора.
При прямолинейном движении сохраняется привычный прямой характер рулевого управления. Вал-шестерня находится в зоне прямых зубьев (зелёная зона) (рис.5.1.16).
При движении по извилистой дороге, поворотах на перекрёстках или маневрировании при парковке водитель чувствует, что рулевое управление реагирует более динамично. В зоне с косыми зубьями (синяя зона) передаточное отношение с увеличением угла поворота рулевого колеса прогрессивно уменьшается.

Рисунок 5.1.16 – Характер рулевого управления с переменным передаточным отношением
Электрический усилитель рулевого управления с приводом, параллельным оси рулевой рейки
Рулевое управление включает следующие узлы (рис.5.1.17):
· блок подрулевых выключателей с датчиком угла поворота рулевого колеса;
· датчик момента поворота рулевого колеса;
· рулевой механизм (гайка на шариках);
· электродвигатель электроусилителя рулевого управления (синхронный электродвигатель);
· блок управления усилителя рулевого управления;

Рисунок 5.1.17 – Общий вид электромеханического усилителя с приводом, параллельным оси рулевой рейки
С помощью электрического усилителя рулевого управления с параллельным приводом посредством сервопривода на зубчатой рейке создаётся необходимое усилие. Сервопривод (рис.5.1.18) состоит из электродвигателя, гайки шарико-винтовой передачи и блока управления усилителя рулевого управления.

Рисунок 5.1.18 – Сервопривод
Электродвигатель питается непосредственно от силового электронного модуля блока управления. Вращательное движение электродвигателя преобразуется в поступательное движение зубчатой рейки с помощью шариково-винтовой передачи, важнейшим компонентом которой является шариковая гайка. Шариковая гайка приводится зубчатым ремнём от электродвигателя. Принцип действия в основном соответствует принципу действия рулевого управления с электрическим усилителем с двумя приводными шестернями, рассмотренного выше Различие заключается в способе привода шариковой гайки.
Принцип действия шариково-винтовой передачи аналогичен принципу действия обычной винтовой пары. Витки резьбы заменены беговыми канавками, соединение между винтом (ходовым винтом) и гайкой (шариковой гайкой) обеспечивается шариками в беговых канавках. Шарики вращаются подобно элементам качения подшипника по замкнутому контуру (рис.5.1.19).

Рисунок 5.1.19 – Принцип действия шарико-винтовой передачи
Для реализации такого принципа вращения в шариковой гайке имеется возвратный канал, соединяющий «начало» и « конец» беговых канавок шариковой гайки друг с другом. При изменении направления вращения гайки изменяется и направление качения шариков, а вместе с этим также и направление продольного перемещения зубчатой рейки.
Рулевой момент определяется датчиком момента поворота рулевого колеса G269 (рис.5.1.20). Входной вал рулевой колонки и вал-шестерня соединены друг с другом торсионом. При повороте рулевого колеса торсион и таким образом входной вал рулевой колонки скручивается относительно вал-шестерни на незначительный угол. Этот угол скручивания регистрируется датчиком. Угол скручивания является непосредственной мерой для измерения рулевого момента.

Рисунок 5.1.20 – Установка датчика момента поворота рулевого колеса
Для реализации функции усилителя рулевого управления применяется трёхфазный синхронный электродвигатель с возбуждением от постоянных магнитов (рис.5.1.21).

Рисунок 5.1.21 – Электродвигатель электроусилителя рулевого управления
Этот тип двигателя выбран на основании следующих важнейших преимуществ:
• Синхронные электродвигатели отличаются малыми размерами при большой мощности;
• Использование возбуждения на постоянных магнитах делает ненужным щётки и контактные кольца для передачи на ротор тока возбуждения.
Необходимые напряжения по отдельным фазам рассчитываются блоком управления и затем реализуются силовыми выходными каскадами на обмотках статора. Статор состоит из девяти полюсных катушек. Катушки соединены последовательно, в три ряда соответственно по три штуки, и запитываются синусоидальным напряжением. Токи, протекающие через каждый из трёх рядов катушек, сдвинуты друг относительно друга по фазе. Магнитные поля трёх рядов катушек складываясь образуют вращающееся магнитное поле, вызывающее синхронное (с магнитным полем) вращение ротора.
Ротор состоит из шести постоянных магнитов, располагающихся с чередованием ориентации полюсов север–юг. Для улучшения плавности вращения ротора полюса его шести магнитов расположены наклонно.
Датчик положения ротора служит для определения положения ротора электродвигателя. Блок управления должен знать точное положение ротора, чтобы правильно рассчитать фазовые напряжения, необходимые для создание вращающегося магнитного поля статора (электронная коммутация с использованием сигналов датчиков). Сигнал датчика положения ротора используется также для определения приближения к одному из крайних положений рулевого механизма. В зоне непосредственной близости к крайнему положению степень усиления рулевого механизма «мягко » увеличивается, это позволяет избежать резких ударов об ограничитель при быстром вращении рулевого колеса.
На катушку возбуждения (рис.5.1.22) подаётся сигнал напряжения синусоидальной формы. Создаваемое катушкой магнитное поле действует на диск ротора. Диск ротора проводит магнитный поток создаваемого катушкой возбуждения переменного магнитного поля к приёмным катушкам. Тем самым в приёмных катушках наводится переменное напряжение, сдвинутое по фазе относительно напряжения в катушке возбуждения, причём этот сдвиг по фазе пропорционален положению роторного диска.

Рисунок 5.1.22 – Распознавание положения ротора
Работа усилителя происходит следующим образом (рис.5.1.23):
1. Усилитель рулевого управления включается в работу сразу, как только водитель повернёт рулевое колесо.
2. В результате усилия, приложенного к рулевому колесу, закручивается торсионный стержень, соединённый с валом-шестернёй рулевой колонки.
Датчик момента поворота рулевого колеса измеряет это закручивание, определяет по нему величину момента и передаёт эту информацию блоку управления.
3. Датчик угла поворота даёт текущее значение угла поворота рулевого колеса.
4. Блок управления в зависимости от момента усилия, приложенного к рулевому колесу, скорости автомобиля, числа оборотов двигателя и параметрической характеристики, заложенной в блоке управления, определяет величину необходимого поддерживающего усилия и включает электродвигатель.
Данные об угле поворота рулевого колеса и скорости используются, например, для корректирования прямолинейного движения.
5. Поддержка усилия для привода рулевого управления осуществляется посредством гайки на шариках с приводом от зубчатого ремня.
Привод данной гайки осуществляется от электродвигателя посредством зубчатого ремня.
6. Сумма усилия, прилагаемого к рулевому колесу, и силы поддержки от электродвигателя даёт результирующее усилие, которое прилагается к зубчатой рейке.

Рисунок 5.1.23 – Работа органов рулевого управления
Работа усилителя при парковке, при движении в условиях города и по скоростной магистрали практически не отличается от работы электрического усилителя с двумя шестернями, рассмотренного ранее.
Система компенсации увода (называемая также системой компенсации управляющего момента (Torque Steer)) является новой функцией электрического усилителя рулевого управления для переднеприводных автомобилей.
Эта система препятствует уводу в сторону при разгоне автомобиля с мощным двигателем и различной длиной приводных валов (рис.5.1.24).

Рисунок 5.1.24 – Система выравнивания перекоса
1. При поперечном расположении двигателя у переднеприводных автомобилей приводные валы заметно различаются по длине и имеют различные углы наклона, в результате чего при ускорении вращения колёс моменты вокруг вертикальных осей могут заметно различаться.
Эти моменты могут привести к уводу автомобиля.
2. В результате возникает сила, приложенная в направлении действия большего момента вокруг вертикальной оси.
3. Блок управления усилителя рулевого управления рассчитывает поддерживающее усилие, необходимое для компенсации увода, и включает электродвигатель.
4. Таким образом, необходимое поддерживающее усилие через ременную передачу передаётся на гайку, установленную на зубчатой рулевой рейке.
5. Действующее на рулевой механизм усилие создаётся исключительно усилителем рулевого управления.
Обратное подруливание при заносе является дополнительной функцией обеспечения безопасности в системе курсовой стабилизации ESP. Эта система помогает водителю стабилизировать положение автомобиля в критических ситуациях (например, при торможении на дорожном полотне с неоднородным сцеплением или при поперечном динамическом маневрировании) (рис.5.1.25).

Рисунок 5.1.25 – Обратное подруливание при заносе
1. При неоднородном сцеплении с дорожным полотном во время торможения возникают поперечные силы и заносы, которым нужно противодействовать поворотом рулевого колеса.
Водитель осуществляет подруливание для компенсации этих сил.
2. Датчик угла поворота измеряет, насколько водитель повернул рулевое колесо.
3. Через шину CAN эти сигналы передаются на блок управления системы ESP, который с помощью своих датчиков распознаёт критическую ситуацию. Затем он рассчитывает необходимое поддерживающее усилие для того, чтобы помочь водителю поворачивать рулевое колесо, и передаёт его значение в блок управления усилителя рулевого управления.
4. Блок управления усилителя рулевого управления включает электродвигатель.
5. Таким образом, необходимое поддерживающее усилие для рулевого управления передаётся через ременную передачу на гайку, установленную на зубчатой рулевой рейке.
6. Действующая на рулевую рейку сила состоит из суммы силы от момента на рулевом колесе и поддерживающей силы со стороны усилителя руля.
Электрический усилитель с коаксиальным расположением электродвигателя
Основой конструкции усилителя является электродвигатель, расположенный коаксиально «вокруг» зубчатой рейки, которая в этом случае представляет собой ходовой винт. Такая схема была выбрана потому, что она позволяет достичь высокой эффективности в сочетании с малыми размерами. Зубчатая рейка, электродвигатель, механизм винт-гайка с циркулирующими шариками, электронный блок управления и все необходимые датчики совмещены в одном компактном узле (рис.5.1.26).

Рисунок 5.1.26 – Конструкция электрического усилителя с коаксиальным расположением электродвигателя
Электродвигатель создаёт необходимый для усиления вращающий момент. В приводе используется трёхфазный синхронный электродвигатель с возбуждением от постоянных магнитов.
Необходимые напряжения по отдельным фазам рассчитываются блоком управления и затем реализуются силовыми выходными каскадами на обмотках статора. Статор состоит из 12 полюсных катушек (рис.5.1.27).

Рисунок 5.1.27 – Электродвигатель электроусилителя рулевого управления
Катушки объединены в три ряда по четыре катушки и запитываются синусоидальным напряжением. Токи, протекающие через каждый из трёх рядов катушек, сдвинуты друг относительно друга по фазе. Магнитные поля трёх рядов катушек, складываясь, образуют вращающееся магнитное поле, вызывающее синхронное (с магнитным полем) вращение ротора.
Ротор конструктивно представляет собой полый цилиндр, устанавливаемый на зубчатой рейке. В роторе имеются 10 постоянных магнитов, ориентированных попеременно северным и южным полюсами наружу.
Преобразование вращательного движения ротора электродвигателя в поступательное движение зубчатой рейки осуществляется с помощью механизма винт-гайка с циркулирующими шариками, описанного выше.
Гайка данного механизма жёстко связана с полым ротором электродвигателя. На другой стороне винта механизма имеется зубчатая рейка. При включении электродвигателя его ротор приходит в движение и вращает гайку. Тем самым ходовой винт / зубчатая рейка приходит в поступательное движение. В зависимости от направления вращения электродвигателя усиливающее действие рулевого механизма может быть направлено в сторону поворота колёс влево или вправо. Величина дополнительного, усиливающего момента рулевого механизма определяется силой тока, протекающего через катушки электродвигателя.
Основой для расчёта необходимого усиливающего момента рулевого механизма является значение момента, с которым водитель поворачивает рулевое колесо. Для определения этого момента служит датчик момента поворота рулевого колеса G269. Как и в обычном рулевом управлении с гидроусилителем, рулевой вал и вал-шестерня соединены между собой торсионным стержнем. Когда водитель поворачивает рулевое колесо, торсионный стержень закручивается. При этом рулевой вал оказывается повёрнутым относительно вала-шестерни на угол, величина которого зависит от момента, прилагаемого водителем к рулевому колесу. Датчик момента поворота рулевого колеса G269 измеряет этот угол.
Кольцевой постоянный магнит с восемью парами полюсов жёстко связан с рулевым валом (рис.5.1.28). Два зубчатых диска, с восемью зубьями каждый, жёстко соединены с валом-шестернёй. При этом эти диски повёрнуты друг относительно друга так, что если смотреть сверху (вдоль оси вала), то зубья одного диска будут находиться точно в промежутках между зубьями другого диска. Посередине между обоими дисками находятся два датчика Холла, жёстко связанные с корпусом датчика.

Рисунок 5.1.28 – Датчик момента поворота рулевого колеса
Когда рулевое колесо не повёрнуто, диски находятся в таком положении относительно кольцевого магнита, что их зубья стоят точно посередине между соседними полюсами магнита (северным и южным) (рис.5.1.29, а). Таким образом, через оба зубчатых диска проходит одинаковое количество магнитных линий от каждого из полюсов. Магнитное поле между зубчатыми дисками отсутствует. Оба датчика Холла передают одинаковый выходной сигнал.

Рисунок 5.1.29 (а) – Принцип действия датчика момента поворота рулевого колеса: рулевое колесо не повернуто
Поворот рулевого колеса приводит к закручиванию торсионного стержня и, тем самым, к повороту кольцевого магнита относительно зубчатых дисков (рис.5.1.29, б). В результате поворота кольцевого магнита изменяется положение полюсов магнита относительно зубьев обоих дисков, зубья дисков больше не находятся посередине между соседними северным и южным полюсами. В зависимости от направления приложенного к рулевому колесу крутящего момента зубья одного из дисков будут в большей степени находиться напротив северных полюсов магнитов, а зубья другого — напротив южных. Это вызовет возникновение магнитного поля между обоими дисками, которое будет зафиксировано датчиками Холла.

Рисунок 5.1.29 (б) – Принцип действия датчика момента поворота рулевого колеса: рулевое колесо повернуто
Принцип действия электрического усилителя заключается в следующем.
1. Открывание двери водителя
При открывании двери водителя пробуждается шина FlexRay и запускается обмен данными между блоками управления. Блок управления J500 запускает процессы инициализации, выполняется самодиагностика системы.
2. Включение зажигания
Блок управления комбинации приборов J285 включает на короткое время, для проверки, контрольную лампу. Если неисправности обнаружено не будет, контрольная лампа через несколько секунд снова гаснет.
3. Запуск двигателя
Когда обороты двигателя автомобиля превышают 500 об/мин, активируется усилитель рулевого управления. Как только торсионный стержень не будет скручен вследствие приложения к рулевому колесу момента сил (распознаётся по сигналу датчика момента поворота рулевого колеса G269), выполняется синхронизация сигналов датчика угла поворота рулевого колеса G85 и датчика положения ротора. В памяти блока управления J500 в виде характеристики сохранена зависимость сигналов обоих датчиков друг от друга. Далее при движении автомобиля определение положения рулевого механизма осуществляется по сигналу датчика положения ротора.
При выборе характеристики усиления, применяемой при работе усилителя рулевого управления, блок управления учитывает выбранную настройку режимов движения.
4. Движение автомобиля (рис.5.1.30)
При движении автомобиля коэффициент усиления, с которым работает усилитель рулевого управления, определяется на основании момента и угла поворота рулевого колеса, а также скорости автомобиля. Блок управления рассчитывает необходимые значения токов питания электродвигателя, после чего силовые выходные каскады устанавливают эти значения тока в обмотках статора электродвигателя. Вращательный момент, который электродвигатель через механизм винт-гайка передаёт на зубчатую рейку, усиливает момент поворота рулевого колеса водителем.

Рисунок 5.1.30 – Работа органов рулевого управления
5. Отключение усилителя рулевого управления
Если на продолжающем движение автомобиле будет выключен двигатель, то, когда скорость автомобиля снизится до 7 км/ч, усилитель рулевого управления выключится, с некоторой растяжкой по времени (чтобы избежать резкого скачка усилий на рулевом колесе).
© Филиал БНТУ «Бобруйский государственный автотранспортный колледж» Зарегистрирован в Государственном регистре информационных ресурсов Беларуси 16.06.2011 №7141101591
Что такое система активного рулевого управления


Рассмотрим принцип работы системы активного рулевого управления, плюсы и минусы, устройство и схему. В конце статьи видео-обзор активного рулевого управления для автомобилей BMW. Рассмотрим принцип работы системы активного рулевого управления, плюсы и минусы, устройство и схему. В конце статьи видео-обзор активного рулевого управления для автомобилей BMW.

Активное рулевое управление – усовершенствованная технология обычного рулевого управления. Чаще всего в перечне систем автомобиля обозначается как AFS — Active Front Steering, хотя в работе принимают участи и задние колеса. Основное предназначение правильное распределение усилия между всеми деталями и колесами, так же основная деталь повысить эффективность управления автомобилем на разных скоростях и маневрах.
Что такое активное рулевое управление

Система активного рулевого управления по сути это доработанный механизм обычного рулевого управления. Наличие данной системы на борту автомобиля способствует улучшению динамических характеристик, лучшему управлению машиной, а так же улучшает комфорт. Впервые систему AFS (активного рулевого управления) установили в 2003 году на топовые комплектации автомобилей BMW.
Если рассматривать более детально, то активное рулевое управление может менять передаточное число между рулевым колесом и механизмом поворота колес, в зависимости от скорости движения. К тому же система может самостоятельно корректировать угол поворота передних колес в момент входа в поворот или торможения на скользкой дороге. В дополнение ко всему система активного рулевого управления может подруливать задними колесами, тем самым увеличивая маневренность автомобиля.
Устройство активного рулевого управления

Устройство системы активного рулевого управления не самое простое и одновременно объединяет в себе несколько других систем безопасности. Все же специалисты выделяют основные детали, которые отвечают за поворот колес и стабилизацию, остальные механизмы считаются вспомогательными, в том числе и подруливание задних колес. Среди основных механизмов можно назвать рулевую рейку, датчики, блок управления, непосредственно сам руль и рулевые тяги. Теперь же рассмотрим подробней, какую функцию выполняет каждая из деталей.
Весь процесс срабатывания механизма активного рулевого управления начинается с входных датчиков. Независимо от модели автомобиля они предназначены для снятия разных параметров. Например, датчики угла поворота руля, положение электродвигателя, датчики суммарного угла поворота, а так же датчики динамической стабилизации автомобиля. Хотя, последнее время перестают использовать датчик суммарного поворота, снимая информацию с других датчиков автомобиля.

Получив необходимую информацию с датчиков, она поступает в электронный блок управления (ЭБУ). Можно сказать, что это сердце всей системы и благодаря ему, ведется управление всеми механизмами активного рулевого управления. Задача ЭБУ не сложная, принять сигналы, обработать и передать на исполнительные устройства. Больше всего электронный блок активного рулевого колеса взаимодействует с электроусилителем руля, системой управления двигателем и системой динамической стабилизации автомобиля.
После обработки информации сигналы подаются на рулевую рейку, точней электродвигатель рулевой рейки. За счет чего система может самостоятельно решать насколько повернуть рейку в ту или иную сторону. Сам же электродвигатель вращает коронную шестеренку, в результате чего меняется передаточное отношение механизмов. Что касается рулевого колеса и рулевых тяг, то они выполняют те же функции, что и в обычном управлении автомобилем.
Схема активного рулевого управления автомобиля
Учитывая непростую конструкцию механизма активного рулевого управления, а так же поняв, за что отвечают определенные детали, следует рассмотреть смеху механизма.

На фото представлена схема активного рулевого управления автомобиля
-
датчик угла поворота руля;
Можно сказать, что это основные детали системы активного рулевого управления. Помимо перечисленных элементов, так же к механизму относят бачек для рабочей жидкости, аварийный фиксатор, соединительные шланги, редуктор и клапан системы.
Как работает активное рулевое управление

Весь принцип работы системы активного рулевого управления начинается с момента запуска двигателя автомобиля. Как только автомобиль двигается с места, срабатывает датчик угла поворота руля и включается электродвигатель. За счет червячной передачи, электродвигатель вращает шестерню планетарного редуктора. Далее усилие ложится на внешнее зубчатое колесо, которое в свою очередь может менять передаточное число.
В результате такого взаимодействия и слаженной работы механизмов, система способствует снижению количества оборотов рулевого колеса, а значит, повышается комфорт и маневренность на низкой скорости. Если же скорость автомобиля увеличивается, электродвигатель уменьшает скорость вращения. В результате такого соотношения увеличивается передаточное число. Как показывает практика и различные испытания, работа электродвигателя активного рулевого управления перестает функционировать на скорости от 180 до 220 км/час.

На большой скорости усилие рулевого колеса пропорционально передается на рулевой механизм, минуя остальные составные детали. Соответственно и передаточное соотношение становится 1:18. Еще небольшой нюанс происходит с электродвигателем рулевого управления, если скорость продолжает расти, в таком случае электродвигатель начинает вращаться в обратную сторону. Передаточное соотношение, как правило, достигает отметки 1:20. За счет такого распределения усилий, механизм позволяет маневрировать на большой скорости, обеспечивая максимальную безопасность пассажирам.Помимо указанных моментов работы системы активного рулевого управления AFS, она так же улучшает стабилизацию автомобиля, в момент потери сцепления задней оси с дорогой, в случае резкого маневра или торможении на скользких участках. Основной нюанс системы активного рулевого управления в том, что её никак нельзя отключить, поэтому механизм работает все время с момента старта двигателя, до момента пока его заглушат.
Как небольшое дополнение, в автомобилях BMW система активного рулевого управления работает совместно с системой подруливания задних колес. За счет этого автомобиль намного проще входит в резкие повороты, для разворота требуется меньший диаметр, а сама динамика автомобиля на скорости значительно улучшается.
Преимущества и недостатки системы AFS

Как и любой механизм, система активного рулевого управления имеет положительные и отрицательные стороны. Несмотря на сложность механизма, плюсов намного больше, а вот минусов практически нет. Среди положительных моментов системы AFS можно отметить небольшой вес, повышение надежности в управлении, безопасность, комфорт.
Отрицательных моментов в системы активного рулевого управления практически нет, так как механизм работает безотказно и редко дает сбои. Если все-таки сбой произошел, а чаще всего это сбой или полный выход из строя электроники, то, починить, самостоятельно не получится. Необходимо ехать на специализированные сервисы по ремонту системы AFS.
Стоимость ремонта и деталей для AFS

На сегодня систему AFS можно встретить не только на автомобилях марки BMW. Большую часть премиальных машин укомплектовывают данным механизмом или же предлагают в качестве опции. Например, на авто марки Lexus систему активного рулевого управления можно встретить чаще всего.
Как показывает практика и отзывы владельцев автомобилей, чаще всего выходят из строя датчики положения кузова автомобиля. Немудрено, так как дороги оставляют желать лучшего и частая качка кузова попросту неизбежна. В среднем стоимость замены датчика составляет порядка 150-175 долларов за 1 шт. В зависимости от модели авто, их как минимум 4 штуки и чаще выходят из строя попарно. Сам же датчик обойдется около $100-120, получается 50% от стоимости это сам ремонт. Электронный блок управления AFS обойдется порядка 10000 рублей. Дороже всего обойдется ремонт рулевой рейки, в среднем около $1000.

Некоторые владельцы автомобилей умудряются самостоятельно заменить датчики. Можно сказать, это самое простое в данном механизме и не требует особых навыков или инструмента. К тому же есть немало советов и похож ситуаций, которые описаны в деталях.
Система активного рулевого управления, хоть и сложный механизм, но без него современные автомобили были бы не столь комфортными, а безопасность была бы на порядок ниже. Если же есть возможность заказать AFS систему в качестве опции, доплатив за нее, то это не будет лишним, а разница в управлении будет ощутима с первых километров.
Видео-обзор принципа работы системы AFS: