Изучаем Arduino без Arduino c помощью Tinkercad и его сервиса Схемы.
С каждым годом робототехника становиться популярнее. Для разработки роботов и простых проектов используется платформа Arduinо, но для изучения данной платформы нужно купить Arduino UNO или NANO, резисторы, светодиоды, соединительные провода, макетную плату, сервоприводы, двигателя, дисплей, реле, датчики и сенсоры. Начальное вложение от 2 т. руб. при покупке минимального Arduino набора на Aliexpress. Если покупать в наших магазинах стоимость может быть в 2-3 раза больше. Стоит ли покупать железки для изучения робототехники? На данный вопрос можно ответить, попробовав свои силы в сборке схем и программировании Arduino в Tinkercad и его сервисе Circuits.
Что такое Tinkercad?
Tinkercad — графический редактор, предназначенный для создания и печати трехмерных моделей.
Главным преимуществом программы, по сравнению с другими CAD-редакторами, является то, что она представлена в виде онлайн-приложения, и не требует установки на компьютер. Сервисом можно пользоваться прямо в веб-браузере благодаря технологии WebGL, позволяющей отображать трехмерную графику в интернет-обозревателях.
Онлайн-сервис Tinkercad полностью бесплатный, русифицирован, имеет простой интерфейс, понятный даже новичкам, не требует установки дополнительных плагинов и поддерживает работу со всеми основными браузерами (Chrome, Firefox, Opera и другие). CAD-редактор позволяет сохранять готовые проекты на сервере разработчика или на жестком диске компьютера в виде OBJ и STL-файлов, а также обладает возможностью печати моделей.
Tinkercad позиционирует себя как сервис робототехники для начинающих. Изучать схемотехнику и программирование Arduino помогает раздел Схемы.
Tinkercad Arduino
Тинкеркад (Tinkercad Circuits Arduino) – бесплатный, удивительно простой и одновременно мощный эмулятор Arduino, с которого можно начинать обучение электронике и робототехнике. Он предоставляет очень удобную среду для написания своих проектов. Не нужно ни чего покупать, ни чего качать — все доступно онлайн. Единственное, что от вас потребуется — зарегистрироваться.
Возможности симулятора Tinkercad для разработчика Arduino.
- Онлайн платформа, для работы не нужно ничего кроме браузера и устойчивого интернета.
- Удобный графический редактор для визуального построения электронных схем.
- Предустановленный набор моделей большинства популярных электронных компонентов, отсортированный по типам компонентов.
- Симулятор электронных схем, с помощью которого можно подключить созданное виртуальное устройство к виртуальному источнику питания и проследить, как оно будет работать.
- Симуляторы датчиков и инструментов внешнего воздействия. Вы можете менять показания датчиков, следя за тем, как на них реагирует система.
- Встроенный редактор Arduino с монитором порта и возможностью пошаговой отладки.
- Готовые для развертывания проекты Arduino со схемами и кодом.
- Визуальный редактор кода Arduino.
- Возможность интеграции с остальной функциональностью Tinkercad и быстрого создания для вашего устройства корпуса и других конструктивных элементов – отрисованная модель может быть сразу же сброшена на 3D-принтер.
- Встроенные учебники и огромное сообщество с коллекцией готовых проектов
Начало работы в Tinkercad Arduino.
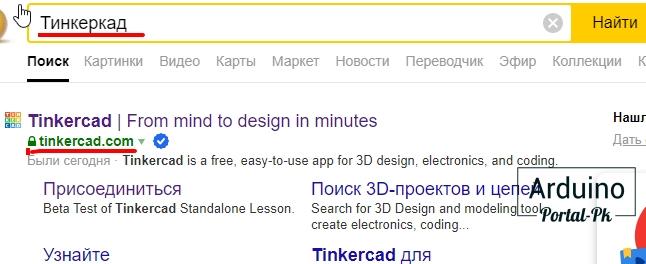
Найти Tinkercad достаточно просто. Для этого в поисковой системе указываем Тинкеркад. Заходим на сайт с доменом tinkercad.com. Для того, чтобы начать пользоваться сервисом нужно авторизоваться или зарегистрироваться.

Регистрация в Tinkercad.
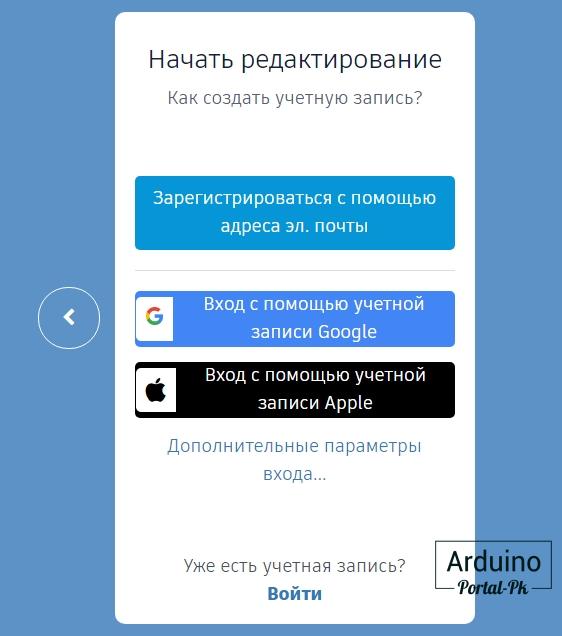
Для того, чтобы зарегистрироваться нажимаем кнопку Присоединиться. Регистрация доступна по E-mail или с помощью учтённой записи Google или Apple.
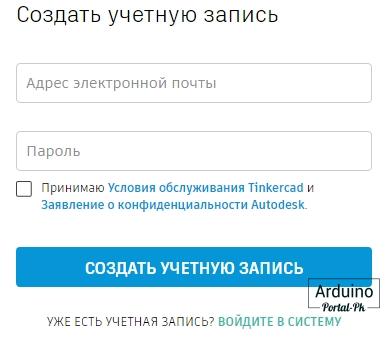
При регистрации с использованием E-mail нужно указать вашу страну, дату рождения, свой E-mail и пароль.
При входе с помощью учтённой записи Google или Apple достаточно разрешить использование сервисом Tinkercad данных для авторизации. Но не забывайте, что у вас должен быть создан аккаунт в данной системе и вы должны быть авторизованы.
Создание первой схемы в Circuits.
После авторизации в сервисе вы попадете в раздел 3D-проектирования. Для создания схем нам нужно перейти в раздел Circuits. Чтобы создать электрическую цепь нужно нажать на кнопку Создать цепь.
После чего нам откроется рабочая область в которой:
- Название проекта;
- Меню управления;
- Панель компонентов;
- Рабочее поле.
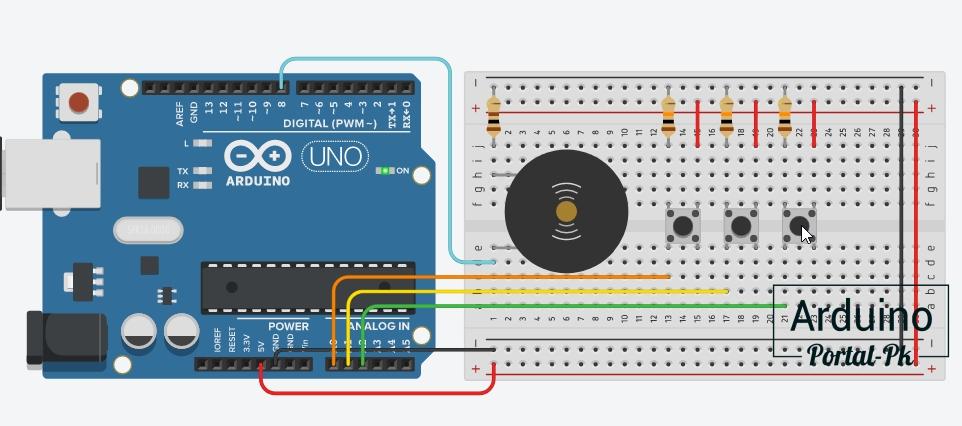
Для того, чтобы создать электрическую цепь достаточно вытащить нужные элементы на рабочее поле и соединить их проводниками. Подробнее о работе с элементами и их описание смотрите в видео.
После того, как схема собрана, нужно нажать на кнопку Начать моделирование. Для проверки работоспособности схемы нажмем на тактовую кнопку. Как видим, при нажатии на кнопку светодиод светиться. Это значит, что схема собрана верно и все работает.
Программирование Arduino в Tinkercad.
После добавления Arduino на рабочий стол у нас появляется возможность работы с кодом. Программировать Arduino можно с помощью блоков на языке Scratch или кодом.
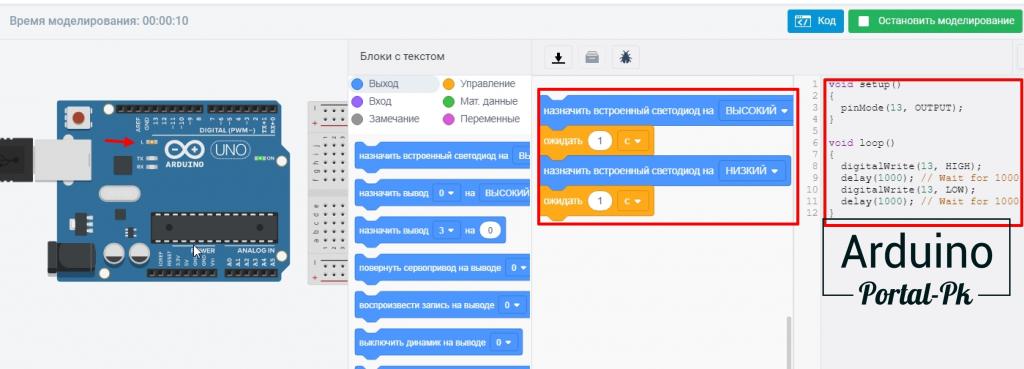
После нажатия Начать моделирование. Мы увидим мигание светодиода на плате Arduino. Мигать светодиод заставляет тестовая программа, которая создается автоматически при добавлении Ардуино на рабочее поле.
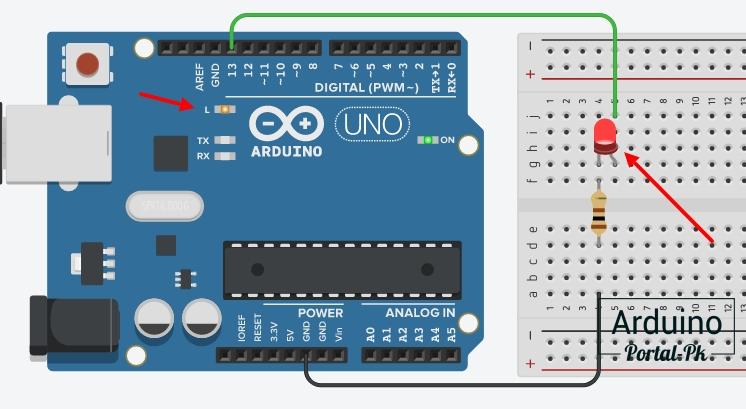
Давайте подключим внешний светодиод. Для этого установим светодиод и резистор на макетную плату. Подключим все по схеме. Встроенный светодиодподключен к 13 пину Арудино. Подключим внешний светодиод к тому же пинуи увидим синхронное мигание встроенного и внешнего светодиода.
Примеры реализации проектов на Arduino.
Для новичков подготовлены несколько готовых схем использования Arduino. Достаточно выбрать схему и вытащить на рабочее поле и начать моделирование.
Часть примеров реализовано с использованием блочного программирования, а вторая часть написана кодом, что позволяет расширить кругозор любого пользователя.
Кроме моделирования данный сервис поможет не сделать ошибки новичку и испортить элементы цепи или спалить Arduino.
Защита от ошибок новичка.
При программировании приложений для ПК или телефона у вас могут возникнуть ошибки с кодом и к серьезным последствиям это навряд ли приведет. Но при разработке проектов на Arduino, нужно не только писать код, но и понимать, как собирать электрические схемы. И при неправильно собранной схеме может перегореть светодиод, исполнительный механизм, датчик, сенсор, модуль и пр. А также может выйти из строя отладочная плата Arduino. Вот почему так важно понимать, как правильно собирать электрические схемы.
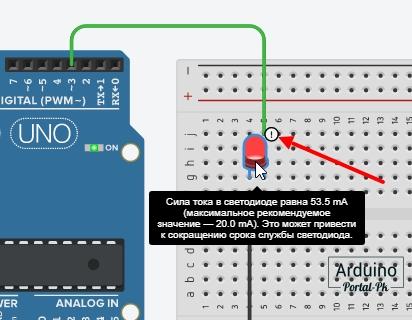
При сборе схем в Tinkercad Circuits вы защищены от основных ошибок новичка. Например, если вы подключите светодиод без резистора, то вы увидите предупреждение о том, что ток превышен, что может привести к быстрому выходу из строя светодиода.
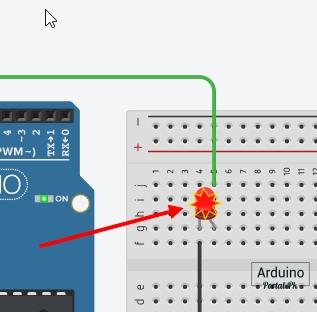
А при значительном превышении тока будет вот такое изображение. Которое обозначает, что светодиод сгорел. В реальной схемотехнике при такой ситуации сгорит не только светодиод, но может выйти из строя Arduino.
Вот почему так важно сперва проверить схему, а потом подавать напряжение. Если вы новичок и у вас есть Arduino и все необходимые комплектующие, не пренебрегайте данным сервисом, так как лучше проверить все на работоспособность, смоделировав схему, чем ждать, когда придет новая Arduino.
Понравилась статья? Не забудь поделиться с друзьями в соц. сетях. А также подписаться на наш канал на YouTube, вступать в группу Вконтакте, в группу на Facebook.
До встречи в следующем уроке. Спасибо за внимание!
Технологии начинаются с простого!
Понравилась статья? Поделитесь ею с друзьями:
Как использовать шаговый двигатель в тинкеркад

В первой части статьи мы выяснили, какие материалы нужны для создания робота, изучили сервоприводы и подготовили их для полноценной сборки руки. Во второй части займёмся соединением всех компонентов в единый механизм. Приготовьте свою заготовку из сервоприводов, список необходимых материалов можно посмотреть в первой части статьи.
Шаг 5: сборка пальцев
Рисунок 1. Фаланга пальца
Очистите опорную конструкцию дрелью и убедитесь, что вы можете продеть леску через каждое отверстие. Разложите сегменты пальцев и склейте их вместе. Старайтесь не залить клеем соединения или отверстия, через которые проходит леска.
Рисунок 2. Палец
Проденьте резинку через отверстия на верхней стороне, и, если вы хотите проверить леску, проденьте её через отверстия на нижней стороне. При натягивании палец должен сжиматься, а при отпускании резинка будет тянуть его назад. Повторите для 4 пальцев (большой палец делается позже).
Рисунок 3. Добавление резинки
Возьмите три резистора, отложенных ранее и припаяйте к ним провода. Рекомендуем надеть на их концы термоусадочные трубки разных цветов, чтобы легче было различать сегменты. Поверните все переменные резисторы на 90 градусов (между двумя концами, блокирующими вращение), затем вставьте каждый из них в указательный, средний и безымянный пальцы (рисунок 4). Мизинцу он не нужен, потому что и он, и безымянный палец подключены к одному и тому же сервоприводу.
Рисунок 4. Вставка резисторов
Поместите пальцы в отверстия напечатанной на 3D-принтере ладони (сверху) и проденьте резинку её через отверстие. Удерживая руку в натянутом положении, добавьте суперклей или эпоксидную смолу. Проденьте провода через ладонь и вытащите у запястья.
Рисунок 5. Провода в руке
Шаг 6: создайте руку
Прикрутите 4 чёрных шкива к 4 модифицированным сервоприводам.
Выше вы можете найти рисунок 6, на котором видно, куда идут все сервоприводы в руке, и где соединяется леска. Чтобы упростить проводку, соберите её в следующем порядке:
- сервопривод непрерывного вращения для сокращения большого пальца;
- пропустите сервопривод через ладонь провода к обычному, неизмененному SG90 для вращения большого пальца;
Рисунок 7. Рука с сервоприводами
- компактный двигатель постоянного тока 2-в-1 (примечание: самый большой шкив, к которому привязаны мизинец и большой палец);
- сервопривод непрерывного вращения для сокращения среднего пальца;
Прежде чем продолжить, проверьте ещё раз, все ли сервоприводы работают (проще исправить проблемы до того, как рука будет собрана).
Рисунок 8. Склейка плетёного нейлонового рукава
Все провода должны выходить из отверстия сбоку ладони. Как упоминалось в предыдущем шаге, убедитесь, что у вас есть система распознавания разных проводов. Наденьте на провода плетёный нейлоновый рукав, либо используйте ленту или стяжки.
Рисунок 9. Леска
К каждому из шкивов привяжите кусок лески. Отлично подойдёт гвоздичная сцепка с капелькой суперклея, чтобы леска не соскальзывала. Проденьте её через отверстия на другой половине ладони, по направлению к пальцам.
Рисунок 10. Соединение
Соедините две половины ладони вместе. Пропустите леску через 4 пальца и завяжите её узлом на концах каждого.
Рисунок 11. Связка пальцев
Шаг 7: запястье
Вверните 8 винтов на каждый конец четырёх заготовленных заранее пружин. Важно использовать винты с достаточно широкой головкой, чтобы они не проскальзывали через концы пружин.
Вкрутите обе стороны пружины — одну в ладонь, другую в предплечье. Для этого нужно их согнуть и использовать тонкую отвертку (будьте осторожны, не растяните пружины).
Рисунок 13. Вверните пружины
Как только все 4 пружины соединят предплечье с ладонью, разместите между ними напечатанную на 3D-принтере сферу. Вместо неё можно использовать шарик для пинг-понга.
Рисунок 14. Соединение деталей
Передвиньте сервоприводы на 90 градусов. Код можно найти здесь:
Под углом нужным углом привяжите два отрезка лески к сервоприводам, по одному на каждый конец. Установите SG90 в предплечье.
Рисунок 15. Крепление
Несколько советов:
Из 4 отверстий для винтов, используемых для крепления сервоприводов, только к одному можно добраться с помощью отвертки, поэтому рекомендуем воспользоваться клеем, чтобы закрепить их.
После установки сервоприводов, пропустите леску через каждое отверстие предплечья и завяжите узел вокруг винта.
Шаг 8: предплечье и проводка
Рисунок 16. Предплечье
Проденьте провода через трубку, сбоку от первой части предплечья (рисунок16). Прикрутите вторую часть к первой. Поместите 9-вольтовую батарею в гнездо предплечья и припаяйте штекер постоянного тока с «+» в центре.
Рисунок 17. Вставка батареи
На изображении 18 вы можете увидеть, как выглядит чип, который был сохранён от модифицированного сервопривода 2-в-1.
Припаяйте двигатель к соответствующему резистору (который находится в костяшках указательного и безымянного пальцев), опираясь на микросхему. Теперь этот сервопривод работает так же, как и другие (рисунок 19).
Рисунок 19. Схема
На рисунке 20 есть схема подключения к плате Arduino Uno. Обратите внимание, что красные сервоприводы — обычные, а фиолетовые — те, у которых нет показаний положения с резистора.
С помощью потенциометра, помещённого в сустав среднего пальца, можем получать показания вращения и использовать его для управления соответствующим фиолетовым сервоприводом с непрерывным вращением.
Рисунок 20. Подключение к Arduino
Добавляем переключатель мгновенного действия к контакту 6, который можно использовать для взаимодействия с Arduino (для сокращения пальца). Установите Arduino uno в раму и подключите вилку питания от аккумулятора. Приклейте последнюю чёрную пластиковую деталь предплечья.
Рисунок 21. Присоединение платы и батареи
Рисунок 22. Готовая рука
Шаг 9: большой палец
Рисунок 23. Палец
Соберите сегменты большого пальца подобно сборке предыдущих. Приклейте резинку к последнему сегменту (рисунки 24 и 25).
Рисунок 24. Присоединение резинки
Прикрутите крепление оси большого пальца к сервоприводу, выступающему из руки. Приклейте обе части большого пальца вокруг оси (рисунок 25).
Рисунок 25. Склейка
Проденьте леску через отверстия в нижней части большого пальца и сделайте узел на конце.
Шаг 10: код
Скачайте код по ссылке:
Советы при работе с кодом:
В нём только три основных движения руки: взмах, сжатие в кулак и удержание ключа. Вы можете поэкспериментировать и добавить новые функции.
Диапазон движения сервопривода составляет 90, 180 градусов. 90 — палец, находящийся в состоянии покоя, выпрямленный, 180 — полностью сжатый палец. Значения вне диапазона недействительны и будут соответствовать неестественному изгибу пальца к тыльной стороне ладони.
В функции moveThumb() вам нужно изменить диапазон rotAngle с 60, 140 на что-то другое, в зависимости от того, в какое положение был повернут сервопривод при прикреплении большого пальца.
Не забудьте проверить работоспособность своеего робота. Если хотя бы один из пальцев не работает, обязательно вернитесь к началу инструкции и проверьте все подключения.
Всё готово! Теперь в вашем арсенале есть универсальный помощник, которому можно поручить многое: подержать только что найденные ключи, пока вы ищете потерянный телефон, взмахом поприветствовать гостей, в то время как вы завершаете готовку и др. Главное — не вживлять в руку искусственный интеллект, иначе ваши друзья почувствуют себя героями фильма «Семейка Адамс».
Прочитано 560 раз
Опубликовано в Технологии
Пятница, 04 марта 2022 20:01
Рука-робот: часть 1

Как же тяжело выполнить все поставленные задачи в срок и перестать говорить себе фразу: «У меня же не сто рук, а всего лишь две!». Сегодня мы расскажем о возможности собрать настоящего робота-помощника, потенциал которого будет зависеть от широты вашей фантазии. Мы рассмотрам лёгкие команды, такие как сжатие, махи, сгибание.
Роботизированная рука — способ облегчить задачу себе или людям с ограниченными возможностями. В этом гайде мы рассмотрим создание робота с элементарным функционалом, но его модернизация зависит только от вас — не бойтесь экспериментировать. Уверены, если вы возьмтесь за модернизацию, сможете добиться гораздо больших высот! Пособие будет состоять из двух частей: во-первых, подготовка материалов, работа с сервоприводами, во-вторых, полная сборка руки, программный код и использование.
Что вам понадобится?

- филамент (нить) для 3D-печати (чёрно-белый PLA);
- 8 сервоприводов SG90;
- леска;
- тонкий эластичный шнур;
- 4 пружины;
- термоусадочная трубка;
- запасной провод;
- плетёный нейлоновый рукав (можно заменить стяжками);
- Arduino uno;
- аккумулятор (9 В или Lipo);
- 3D-принтер;
- паяльник
- отвёртка;
- суперклей или эпоксидная смола;
- дрель и плоскогубцы для очистки опорной конструкции;
- инструмент для зачистки проводов/кусачки.
Шаг 1: 3D-печать
Рисунок 1. 3D-модель
3D-принтер не всегда может быть под рукой, но в своём инстаграме (https://www.instagram.com/in_hub/) мы разыграем один принтер, когда отметка подписчиков достигнет 3000! Скорее переходите по ссылке и подписывйтесь, возможно именно вы станете счастливым обладателем нового устройства для 3D-экспериментов.
Файлы Fusion 360 можно найти здесь: http://a360.co/2ufYJJV
Чтобы напечатать руку в 3D, вам необходимо загрузить файл .f3d по ссылке выше, открыть его в программе Fusion 360 и экспортировать отдельные части в виде файлов .stl в выбранное вами программное обеспечение для 3D-печати.
Кончики пальцев предназначены для печати на 3D-принтере с двойной экструзией, поскольку чёрные кончики слишком тонкие, чтобы их можно было печатать самостоятельно. Все остальные части будут печататься одинаково как на двойном, так и на одиночном экструзионном принтере.
Шаг 2: сервопривод с непрерывным вращением

Рисунок 2. Сервопривод с непрерывным вращением
Вращение сервоприводов ограничено из-за переменных резисторов (устройств, которые имеют переменное сопротивление, при их вращении можно считывать изменения и вычислять угол поворота), которые не могут вращаться более чем на 180 градусов.

Рисунок 3. Пластиковая заглушка
Чтобы обойти это ограничение, откройте сервопривод и отрежьте пластиковую заглушку на самой верхней шестерне (смотри рисунки 2 и 3).
Затем просверлите отверстие в центре, чтобы шестерня свободно вращалась и не сталкивалась с D-образным креплением потенциометра (рисунок 4).

Рисунок 4. Сверление центра
Теперь шестерня может непрерывно вращаться, в то время как переменный резистор двигаться не будет. Соберите сервопривод и протестируйте его с помощью приведённого ниже кода. Сделайте два таких сервопривода.
Важно: при модификации сервопривода убедитесь, что вы повернули резистор в среднее положение. Если потенциометр будет повернут к любому из концов, он будет показывать угол 180 или 0, и код не будет работать.
Шаг 3: компактные двигатели постоянного тока 2-в-1

Рисунок 5. Разобранный сервопривод
В этом шаге мы расскажем о том, как разместить два сервопривода так, чтобы их не деформировать. Единственным изменением, которое мы совершим, будет увеличение длины проводов, соединяющих двигатель, резистор и микросхему.

Рисунок 6. Отрезание деталей
Откройте сервопривод и отрежьте резистор и чип (пока отложите их).
Из трёх синих пластиковых деталей корпуса вырежьте две нижние. Важно убедиться, что выемка, с помощью которой держится ось, не срезана (рисунок 7).

Рисунок 7. Сравнение срезов выемки (слева — удачный пример, справа — неудачный)
Отрежьте пластиковую заглушку на самой верхней шестерне — это позволит сервоприводу непрерывно вращаться. Соберите корпус, как показано на рисунке 8. Повторите действия со вторым сервоприводом.

Рисунок 8. Сборка сервопривода
В данный момент шестерни не имеют оси, на которой можно было бы вращаться. Найдите подходящий по размеру стержень (8-8,5 мм).

Рисунок 9. Ось для вращения
Используя эпоксидную смолу, склейте сервоприводы вместе (рисунок 10).
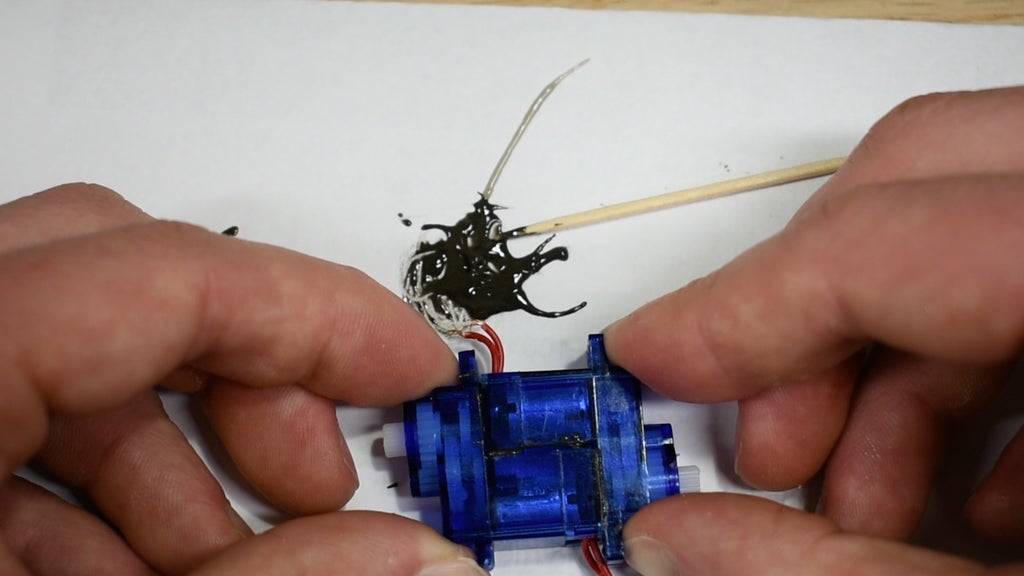
Рисунок 10. Склейка
Припаиваем удлинители к проводам от двигателей постоянного тока.
Чтобы проверить их работу, используйте 3,7-вольтовый Lipo, подключенный к одному из двигателей. Он должен непрерывно вращаться в обоих направлениях (достигается за счёт перестановки батареи).
На последующих этапах сохранённые нами резисторы будут помещены в суставы пальцев для получения показаний поворота (от 0 до 90 градусов). Также их можно использовать при подключении к Arduino.

Рисунок 11. Конструкция сустава большого пальца
Шаг 4: оставшиеся сервоприводы

Рисунок 12. Потенциометр
Три сервопривода оставляем без изменений: один будет использоваться для вращения большого пальца, а два других для движения запястья влево/вправо и вверх/вниз. От четвёртого сервопривода нам нужен только чёрный резистор, остальное можно оставить на запчасти.
На этом первая часть нашего гайда подходит к концу, но это не повод отложить работу в долгий ящик. Впереди нас ждёт пособие по сборке самой руки, а также инструкция о том, как правильно её запрограммиовать. Заинтригованы? Скорее переходите по ссылке и продолжайте экспериментировать!
Прочитано 570 раз
Опубликовано в Технологии
Понедельник, 28 февраля 2022 08:00
Что такое шаговый двигатель и зачем он нужен

Во многих инструкциях или описаниях проектов нередко упоминается шаговый двигатель. В связке с Arduino или Raspberry Pi, он может быть сердцем любого проекта, требующего простого и точного управления положением и движением. Можно собрать любой станок ЧПУ, например, лазерный гравер. Или заняться робототехникой и собрать маленького бегающего робота с ШД в корпусе. Можно даже сделать DIY-контроллер для телескопа на основе Arduino, и отслеживать положение звёзд, сверяясь с данными специальных программ. Возможностей много.
В этой статье мы расскажем, что такое шаговый двигатель и в чём его смысл.
Начнём с того, что шаговый двигатель (ШД) – это один из видов электродвигателей, наряду с линейным или серводвигателем. Подобно своим собратьям, он имеет неподвижную часть, называемую статором, и подвижную – ротор. Его отличительной особенностью является вращение вала на фиксированное количество градусов, и эти дискретные угловые перемещения имеют практически равную величину, потому и называются шагами.
Благодаря этой особенности, можно узнать точное угловое положение вала, просто посчитав, сколько шагов было сделано, без использования датчика.
Особенно хорошо двигатель подходит для устройств, в которых управляющие сигналы подаются в виде цифровых импульсов, а не аналоговых напряжений (любые устройства с программным управлением). Один цифровой сигнал, подаваемый на привод шагового двигателя или транслятор, заставляет ротор делать один точный угол движения. По мере увеличения частоты цифровых импульсов, шаговое движение переходит в непрерывное вращение.
На статоре двигателя есть зубцы, на которые наматываются катушки, а ротор представляет собой либо постоянный магнит, либо железный сердечник с переменным сопротивлением.

Рис. 1. Пример шагового двигателя с ротором в виде железного сердечника
Основной принцип работы шагового двигателя заключается в следующем: при подаче напряжения на одну или несколько фаз статора создается магнитное поле (под действием тока, протекающего в катушке), и ротор выравнивается по этому полю. Если последовательно подавать напряжение на разные фазы, можно повернуть ротор на определенную величину и достичь желаемого конечного положения. На рисунке 2 показан принцип работы.
В начале на катушку А подаётся напряжение и ротор выравнивается по создаваемому ею магнитному полю. Когда напряжение уходит на катушку В, ротор поворачивается по часовой стрелке на 60°, чтобы выровняться с новым магнитным полем. То же самое происходит и при подаче напряжения на катушку C.

Производительность шагового двигателя зависит от разрешения (размер шага), скорости вращения и крутящего момента. На эти характеристики, в свою очередь, влияют конструктивные особенности двигателей. Далеко не все ШД имеют одинаковую внутреннюю структуру, поскольку существуют различные конфигурации ротора и статора.
Существует три типа роторов:
– Ротор с постоянным магнитом. Здесь магнит выравнивается с магнитным полем, создаваемым цепью статора. Такое решение гарантирует хороший крутящий момент, а также момент удержания. Недостатками являются более низкая скорость и меньшее разрешение по сравнению с другими типами.

Рис. 3. Секция шагового двигателя с постоянным магнитом
– Ротор с переменным сопротивлением. Представляет собой железный сердечник и имеет специфическую форму, позволяющую выравниваться с магнитным полем (рис. 1 и 2). С помощью такой конструкции легче достичь более высокой скорости и разрешения, но крутящий момент часто ниже, и не имеет момента удержания.
– Гибридный ротор. Этот тип имеет необычную конструкцию и представляет собой гибрид двух предыдущих версий. Ротор имеет две крышки с чередующимися зубцами и намагничен в осевом направлении. Такая конфигурация позволяет двигателю иметь преимущества версий с постоянными магнитами и с переменным сопротивлением, в частности, высокое разрешение, скорость и крутящий момент. Высокая производительность требует более сложной конструкции и, следовательно, более высокой стоимости. На рисунке 4 показан упрощенный пример конструкции гибридного двигателя. Когда на катушку A подается напряжение, зуб N-намагниченного колпачка выравнивается с S-намагниченным зубом статора. В то же время, благодаря структуре ротора, S-намагниченный зуб выравнивается с N-намагниченным зубом статора. Настоящие двигатели имеют более сложную структуру, с большим количеством зубцов, чем показанно на рисунке, хотя принцип работы ШД отображён.

Рис. 4. Гибридный ротор
Статор несёт ответственность за создание магнитного поля. К основным его характеристикам можно отнести количество фаз (независимых катушек) и пар полюсов (количество пар зубцов на одну фазу). Наиболее часто используются двухфазные шаговые двигатели, а трёхфазные или пятифазные встречаются значительно реже.

Рис. 5. Двухвазный (слева) и трёхфазный (справа) ШД
На катушки двигателя необходимо подавать напряжение в определенной последовательности, чтобы создать магнитное поле, с которым будет выравниваться ротор. Чтобы легче контролировать этот процесс и обеспечить лучшую работу двигателя, понадобятся дополнительные устройства. И первое из них – это Н-мост. Он представляет собой интегральную схему, которая управляет электрическим соединением катушек двигателя. Н-мост можно рассматривать как электрически управляемый прерыватель, который, будучи закрытым, позволяет подключать катушку к электрической сети и, таким образом, обеспечивать протекание в ней тока. Для каждой фазы двигателя требуется один Н-мост.
Далее идет предварительный драйвер: он управляет активацией транзисторов Н-моста, обеспечивая необходимое напряжение и ток.
И, наконец, микроконтроллер. Он нужен, чтобы управлять предварительным драйвером и, обычно, программируется пользователем двигателя.

Рис. 6. Схема управления шаговым двигателем
В том случае, если Н-мост и предварительный драйвер собраны вместе в одном устройстве, мы называем это драйвером шагового двигателя.
На рынке представлено множество драйверов, имеющих определенные особенности для реализации конкретных проектов. Но можно выделить три наиболее важные характеристики, на которые можно опираться при выборе драйвера:
– Выходное напряжение и ток (необходимо соответствие характеристикам двигателя);
– Деление шага. Для стандартных задач хватит и 1/64. Уменьшение этого показателя увеличивает плавность хода, но снижает максимальные обороты ротора;
– Протокол. STEP/DIR/ENABLE – самый распространённый протокол управления ШД.

Рис. 7. Популярный в DIY кругах драйвер А4988
Управление шаговым двигателем может происходить в трёх основных режимах:
– Полный шаг. В этом режиме ротор поворачивается на один шаг за раз. Под постоянным напряжением находится либо одна, либо две фазы.
– Полушаг. Использование этого режима позволяет уменьшить размер шага в два раза . Единственным недостатком является то, что крутящий момент, создаваемый двигателем, не является постоянным, поскольку он выше, когда обе фазы находятся под напряжением, и ниже, когда под напряжением находится только одна фаза.
– Микрошаг можно рассматривать как дальнейшее усовершенствование полушагового режима, поскольку он позволяет еще больше уменьшить размер шага, но при этом иметь постоянный крутящий момент. Достигается это совершенство путем управления силой тока, протекающего в каждой фазе.

Рис. 8. Вот так выглядит схема микрошагового режима
Шаговые двигатели используются каждый день в разнообразных промышленных и коммерческих проектах благодаря своей низкой стоимости, надежности, высокому крутящему моменту на низких скоростях и простой, прочной структуре, которая работает практически в любых условиях.
Вот лишь несколько примеров использования ШД:
– принтеры и 3D-принтеры
– роботы и протезы
– зеркальные фотоаппараты и видеокамеры

У вас есть идеи применения ШД в любительской электронике? Доводилось вам уже использовать это устройство в своих проектах? Поделитесь идеями и опытом с нами!
Подключение шагового двигателя к Ардуино

Шаговый двигатель (stepper motor) предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper.h или accelstepper.h. Рассмотрим принцип работы и схему подключения шагового двигателя к Arduino Uno / Nano, а также разберем скетч для управления шаговым мотором.
Принцип работы шагового двигателя
В зависимости от конструкции, сегодня применяются три вида шаговых двигателей: с постоянным магнитом, с переменным магнитным сопротивлением и гибридные двигатели. У двигателей с постоянным магнитом число шагов на один оборот вала доходит до 48, то есть один шаг соответствует повороту вала на 7,5°. Гибридные двигатели обеспечивают не меньше 400 шагов на один оборот (угол шага 0,9°).

Подсчитав количество сделанных шагов, можно определить точный угол поворота ротора. Таким образом, шаговый двигатель является сегодня идеальным приводом в 3D принтерах, станках с ЧПУ и в другом промышленном оборудовании. Это лишь краткий обзор устройства и принципа работы stepper motor, нас больше интересует, как осуществляется управление шаговым двигателем с помощью Ардуино.
Драйвер шагового двигателя Ардуино
Шаговый двигатель — это бесколлекторный синхронный двигатель, как и все двигатели, он преобразует электрическую энергию в механическую. В отличие от двигателя постоянного тока в которых происходит вращение вала, вал шаговых двигателей совершает дискретные перемещения, то есть вращается не постоянно, а шагами. Каждый шаг вала (ротора) представляет собой часть полного оборота.

Вращение вала двигателя осуществляется с помощью сигнала, который управляет магнитным полем катушек в статоре драйвера. Сигнал генерирует драйвер шагового двигателя. Магнитное поле, возникающее при прохождении электрического тока в обмотках статора, заставляет вращаться вал, на котором установлены магниты. Количество шагов задаются в программе с помощью библиотеки Arduino IDE.
Схема подключения шагового двигателя 28BYJ-48 к Arduino Uno через драйвер ULN2003 изображена на рисунке ниже. Основные характеристики мотора 28BYJ-48: питание от 5 или 12 Вольт, 4-х фазный двигатель, угол шага 5,625°. Порты драйвера IN1 — IN4 подключаются к любым цифровым выводам платы Arduino Mega или Nano. Светодиоды на модуле служат для индикации включения катушек двигателя.
Как подключить шаговый двигатель к Ардуино
Для этого занятия потребуется:
- Arduino Uno / Arduino Nano / Arduino Mega;
- драйвер шагового двигателя ULN2003;
- шаговый двигатель 28BYJ-48;
- провода «папа-мама».

Управление шаговым двигателем через Ардуино производится путем подачи импульсов на обмотки мотора в определенной последовательности. Для облегчения управления шаговым мотором созданы специальные библиотеки stepper.h и accelstepper.h, но можно вращать вал мотора без стандартных библиотек. Подключите шаговый мотор к микроконтроллеру, как на схеме выше и загрузите следующий скетч.
Скетч для управления шаговым двигателем
// порты для подключения модуля ULN2003 к Arduino #define in1 8 #define in2 9 #define in3 10 #define in4 11 int dl = 5; // время задержки между импульсами void setup() < pinMode(in1, OUTPUT); pinMode(in2, OUTPUT); pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); > void loop() < digitalWrite(in1, HIGH); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, HIGH); delay(dl); digitalWrite(in1, HIGH); digitalWrite(in2, HIGH); digitalWrite(in3, LOW); digitalWrite(in4, LOW); delay(dl); digitalWrite(in1, LOW); digitalWrite(in2, HIGH); digitalWrite(in3, HIGH); digitalWrite(in4, LOW); delay(dl); digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, HIGH); digitalWrite(in4, HIGH); delay(dl); >
Пояснения к коду:
- вместо портов 8,9,10,11 можно использовать любые цифровые порты;
- время задержки в миллисекундах int dl = 5; можно изменять, чем меньше задержка в программе, тем быстрее будет вращаться вал мотора;
- алгоритм работы программы, представлен на следующей картинке.
Управление шаговым двигателем на Ардуино
Рассмотрим управление шаговым мотором при помощи стандартной библиотеки stepper.h и с помощью более удобной и популярной библиотеки accelstepper.h, где реализовано намного больше дополнительных команд и функций. Схема подключения мотора при этом остается неизменной. Чуть дальше мы перечислили возможные команды, которые можно использовать в программе с этими библиотеками.
Скетч для шагового двигателя на Ардуино (Stepper.h)
#include Stepper.h> // библиотека для шагового двигателя // количество шагов на 1 оборот, измените значение для вашего мотора const int stepsPerRevolution = 200; // устанавливаем порты для подключения драйвера Stepper myStepper(stepsPerRevolution, 8, 9, 10, 11); void setup() < myStepper.setSpeed(60); // устанавливаем скорость 60 об/мин > void loop() < // поворачиваем ротор по часовой стрелке myStepper.step(stepsPerRevolution); delay(500); // поворачиваем ротор против часовой стрелки myStepper.step(-stepsPerRevolution); delay(500); >
Пояснения к коду:
- вместо портов 8,9,10,11 можно использовать любые цифровые порты;
- библиотека Stepper.h имеет маленький функционал, поэтому подходит только для тестирования шагового двигателя и проверки подключения драйвера.
Скетч для шагового мотора с библиотекой AccelStepper.h
#include // библиотека для шагового двигателя
Пояснения к коду:
- библиотеку AccelStepper.h можно использовать при подключении шагового двигателя к Motor Shield L293D совместно с библиотекой AFMotor.h;
- в программе можно задавать не только максимальную скорость, но и ускорение и замедление вала шагового двигателя.
Описание команд библиотеки AccelStepper.h
AccelStepper mystepper(DRIVER, step, direction); // Шаговый двигатель, управляемый платой
AccelStepper mystepper(FULL2WIRE, pinA, pinB); // Шаговый двигатель, управляемый Н-мостом
AccelStepper mystepper(FULL4WIRE, pinA1, pinA2, pinB1, pinB2); // Униполярный двигатель
mystepper.setMaxSpeed(stepsPerSecond); // Установка скорости оборотов в минуту
mystepper.setSpeed(stepsPerSecond); // Установка скорости в шагах за секунду
mystepper.setAcceleration(stepsPerSecondSquared); // Установка ускорения
mystepper.currentPosition(); // Возвращает текущее положение в шагах
mystepper.setCurrentPosition (long position); Обнуляет текущую позицию до нуля
mystepper.targetPosition(); // Конечное положение в шагах
mystepper.distanceToGo(); // Вернуть расстояние до указанного положения
mystepper.moveTo(long absolute); // Переместиться в абсолютно указанное положение
mystepper.move(long relative); // Переместиться в относительно указанное положение
mystepper.run(); // Начать движение с ускорением, функцию следует вызывать повторно
mystepper.runToPosition(); // Начать движение до указанной точки
mystepper.runToNewPosition(); // Начать движение с ускорением до заданной позиции
mystepper.stop(); // Максимально быстрая остановка (без замедления)
mystepper.runSpeed(); // Начать движение с заданной скоростью без плавного ускорения
mystepper.runSpeedToPosition(); // Начать движение без плавного ускорения, до позиции
mystepper.disableOutputs(); // Деактивирует зарезервированные пины и устанавивает их в режим LOW. Снимает напряжение с обмоток двигателя, экономя энергию
mystepper.enableOutputs(); // Активирует зарезервированные пины и устанавивает их в режим OUTPUT. Вызывается автоматически при запуске двигателя
Arduino.ru
Пытаюсь создать гирлянду из обычный светодиодов 5мм
Пнд, 13/12/2021 — 07:25 | by Milford

Сразу скажу я новичок в ардуино и вообще в электронике, пытаюсь сделать гирлянду из обычный светодиодов 5мм как видно на схеме светодиоды теряют яркость по сравнение со светодиодом выше, возможно ли как то создать примерную гирлянду, с большим количеством светодиодов, не теряя мощность и яркость? ссылка на сайт со схемой https://www.tinkercad.com/things/bILcM5rNA6X-start-simulating/editel
ad8232 зачем 3 электрода и как справляться с помехами
Вс, 12/12/2021 — 00:28 | by vasya00
Здравствуйте, пытаюсь подключить модуль ad8232, что то даже получается, на фоне помех отчетливо видны R зубцы, об анализе ЭКГ конечно речи нет из за помех. Но все таки кому то удалось справиться с помехами и получить сколько нибудь пригодные для анализа плёнки? Хотя бы для оценки ритма и ширины комплексов QRS? И ещё не ясно зачем используется 3 электрода? Мы ведь снимаем только одно отведение? Это разность потенциала между двумя точками, зачем третий?
- 11 комментариев
- Читать далее
Вывод растрового монохромного изображения на дисплей TFT 1.77″ 128×160 SPi
Сб, 11/12/2021 — 23:24 | by Дкаэлу 113
необходимо вывести QR-код на tft экран с ардуино уно, использовал инструкцию с https://arduinoplus.ru/arduino-tft-lcd-display/#i-22 , заливает область вывода черным, перекодировал так ка на сайте. Прошу помочь чем сможете)
Работа с ик датчиком и пультом
Пт, 10/12/2021 — 22:26 | by anonim9900
Помогите написать код, чтоб на семисегментном индикаторе появлялась та цифра, что была нажата на пульте. В тинкеркаде пробовал создать цепь, мож по подключению тоже советы будут. Короче, буду благодарен за любую помощь.
- Общий
- Песочница. Раздел для новичков
Многопоточность — ethernetshield + шаговый двигатель
Пт, 10/12/2021 — 16:45 | by God_father86
Написал скетч для управления шаговым двигателем, с кнопок управляется отлично. Теперь возникла необходимость управлять двигателем програмно. Для этого взяли ethernet shield. По http GET-запросом устанавливаю состояния выходов — с LOW на HIGHT. При LOW двигатель должен двигаться, при HIGHT — останавливаться. Проблема в том, что при выполнении программы происходит смена сигнала на LOW, и затем arduino как-будто уходит в себя, докручивает шаговик до конца, и только после этого принимает команду HIGHT.
Нужна помощь в скетче
Пт, 10/12/2021 — 12:16 | by cargoluxe
Всем привет, изучаю первые пару дней ардуинку.